Библиотека Servo
Вы можете генерировать управляющие импульсы самостоятельно, но это настолько распространенная задача, что для ее упрощения существует стандартная библиотека сервоприводов.
Сервоприводом постоянного вращения можно управлять с помощью библиотек Servo или Servo2. Разница в том, что функция Servo.write (angle) устанавливает не угол, а скорость вращения привода.
Библиотека сервоприводов позволяет программно управлять сервоприводами. Управление осуществляется следующими функциями:
- attach () — прикрепить объект к определенной булавке на доске. Есть два возможных синтаксиса для этой функции: servo.attach (pin) и servo.attach (pin, min, max). В этом случае штифт — это номер штифта, к которому подключен сервопривод, min и max — длины импульсов в микросекундах, отвечающие за углы поворота 0 ° и 180 °. По умолчанию они установлены на 544 мкс и 2400 мкс соответственно. Нет возвращаемого значения.
- write () — инструктирует сервопривод принять значение параметра. Синтаксис: servo.write (угол), где угол — это угол, на который сервопривод должен повернуть
- writeMicroseconds () — дает команду на отправку импульса определенной длины на сервопривод, это низкоуровневый аналог предыдущей команды. Синтаксис: servo.writeMicroseconds (uS), где uS — длина импульса в микросекундах. Нет возвращаемого значения.
- read () — считывает текущее значение угла, в котором находится сервопривод. Синтаксис: servo.read (), возвращается целочисленное значение от 0 до 180
- прикрепленный () — проверяет, был ли объект прикреплен к конкретному выводу. Синтаксис следующий: servo.attached (), boolean возвращается, если объект был прикреплен к какому-либо контакту, или false в противном случае
- detach () — выполняет действие, противоположное fixed (), т.е отсоединяет объект от булавки, к которой он был прикреплен. Синтаксис: servo.detach()
В библиотеке серво для Arduino по умолчанию установлены следующие длительности импульса: 544 мкс для 0 ° и 2400 мкс для 180°.
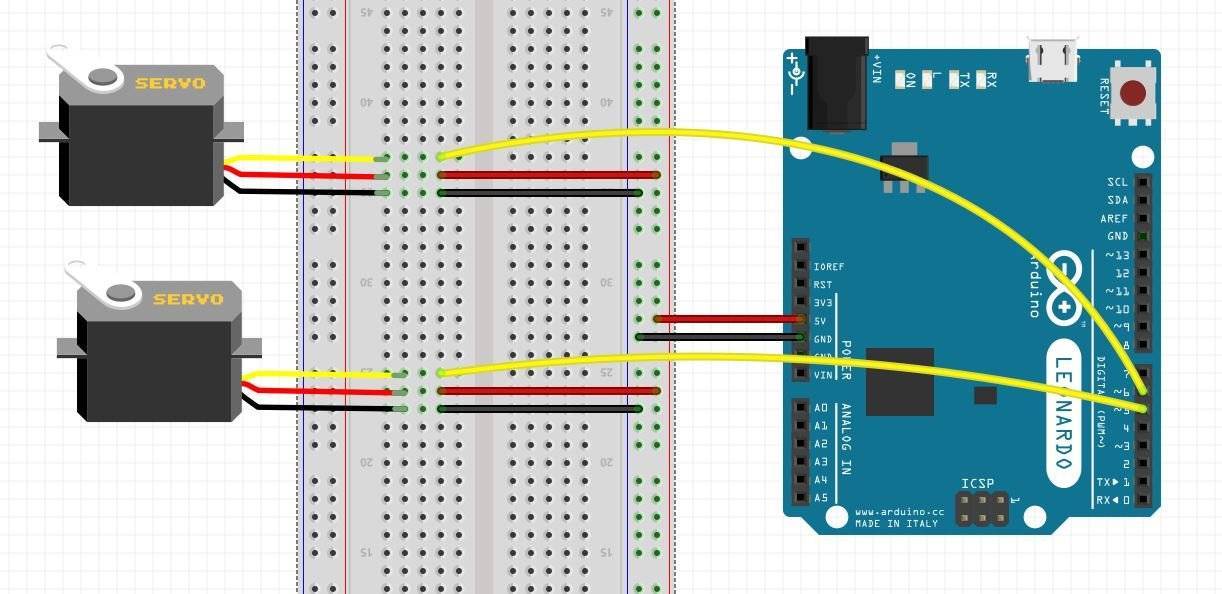
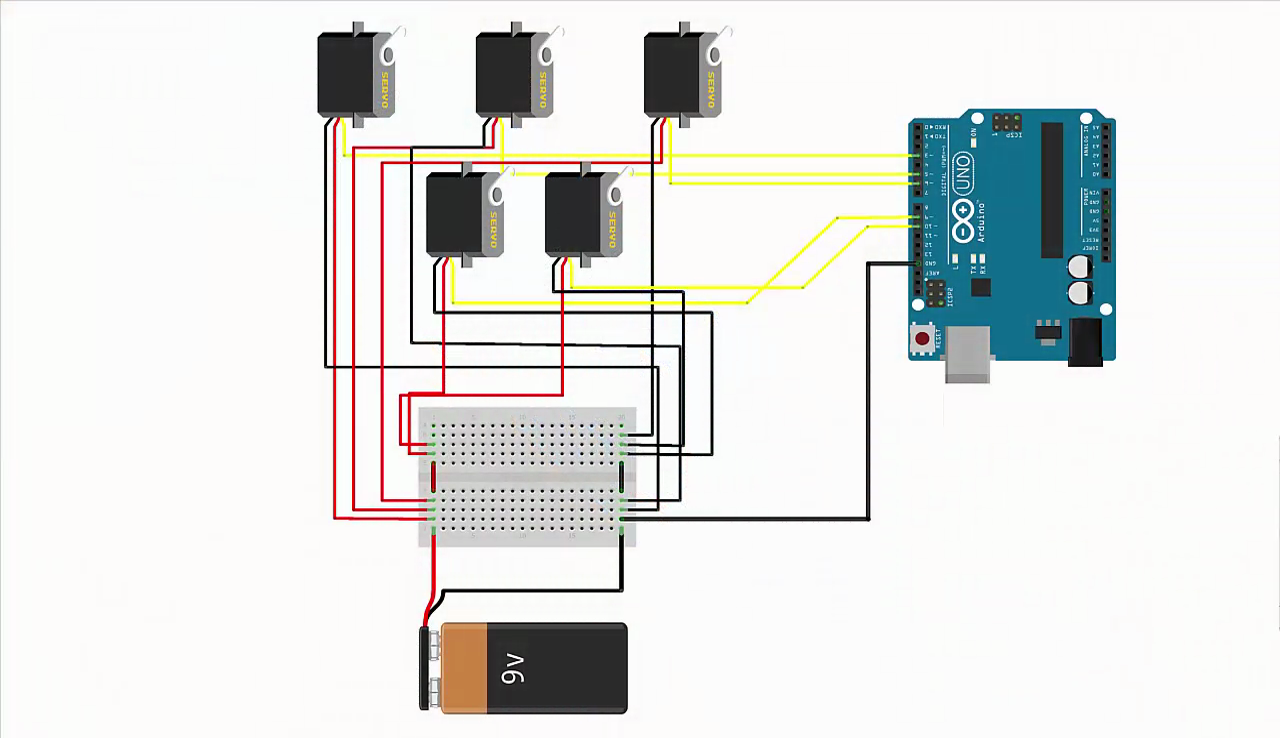
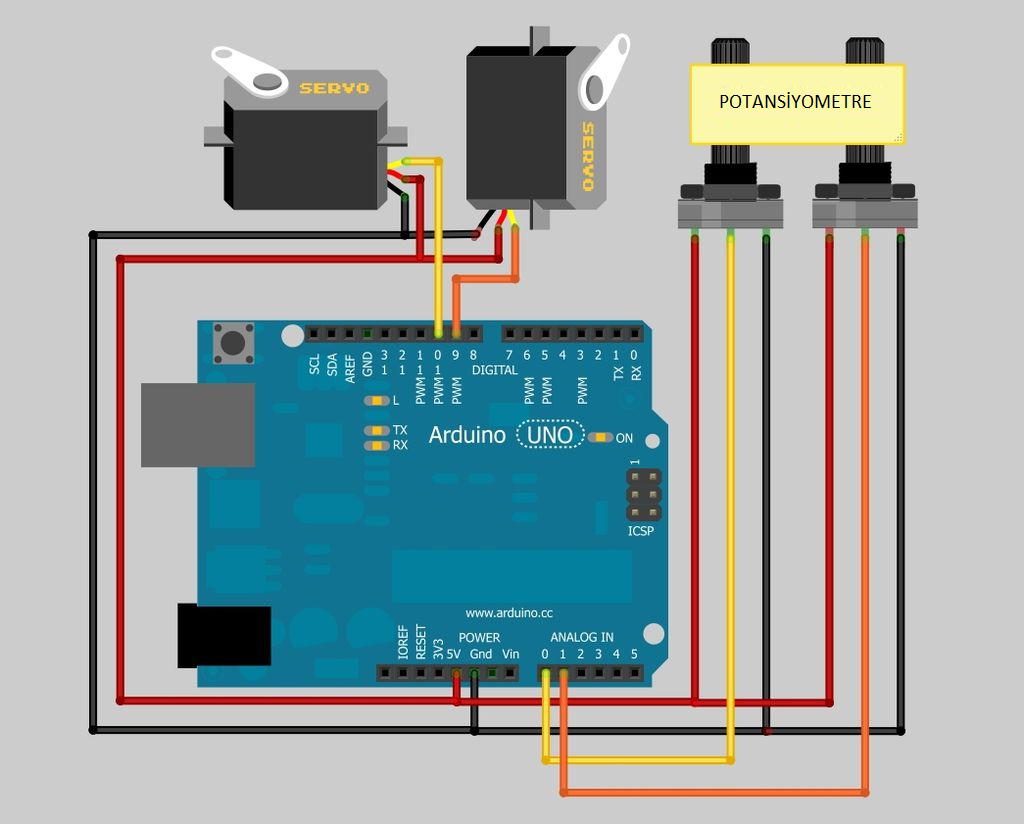
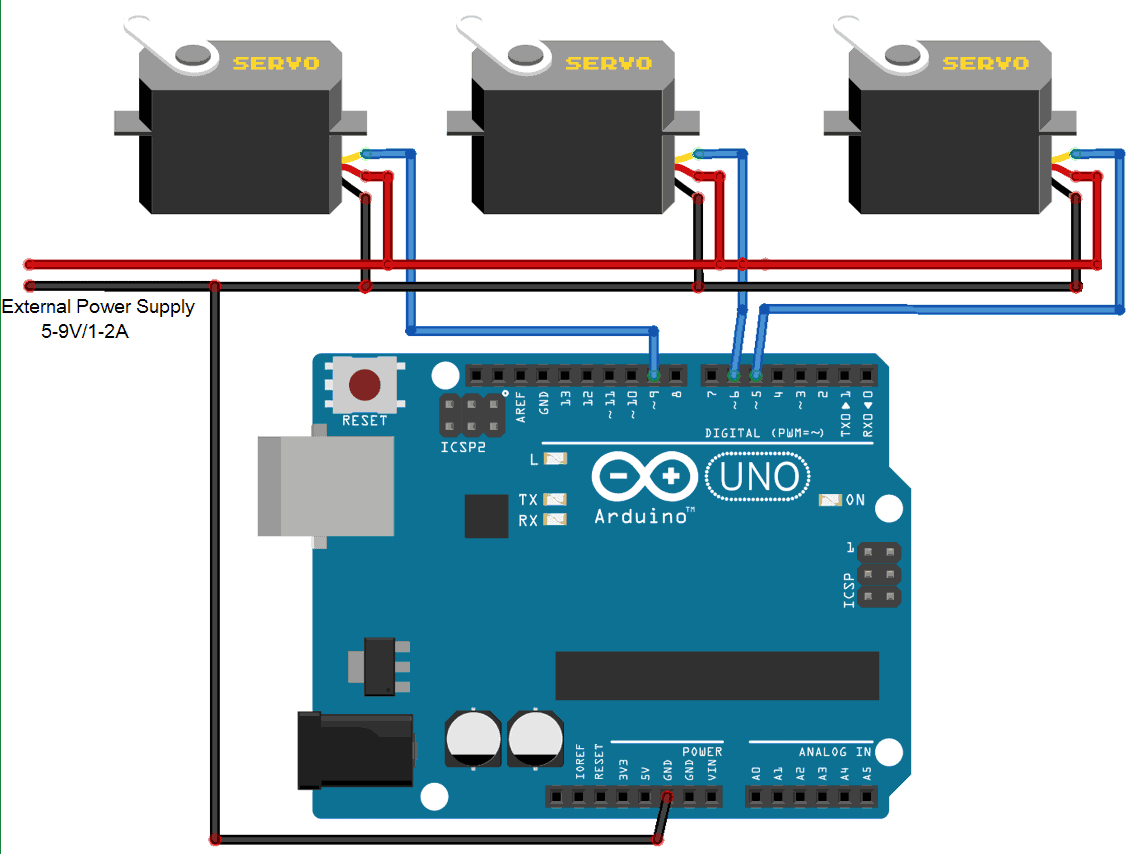
Пример подключения двух сервоприводов.
Библиотека сервопривода несовместима с библиотекой VirtualWire для передатчика и приемника 433 МГц, поскольку они используют одно и то же прерывание. Это означает, что их нельзя использовать в одном проекте одновременно. Существует альтернативная библиотека для сервоуправления: Servo2. Все методы библиотеки Servo2 такие же, как и методы Servo.
Функции работают по-разному при работе с сервоприводами на 360 градусов.
Функция Arduino: сервопривод 180 °, сервопривод 360°
| Серво. Запись (0) | Крайняя левая позиция | Полный ход в одном направлении |
| Сервопривод. Запись (90) | Центральное положение | Остановить сервопривод |
| Серво. Запись (180) | Крайняя правая позиция | Полный ход в обратном направлении |
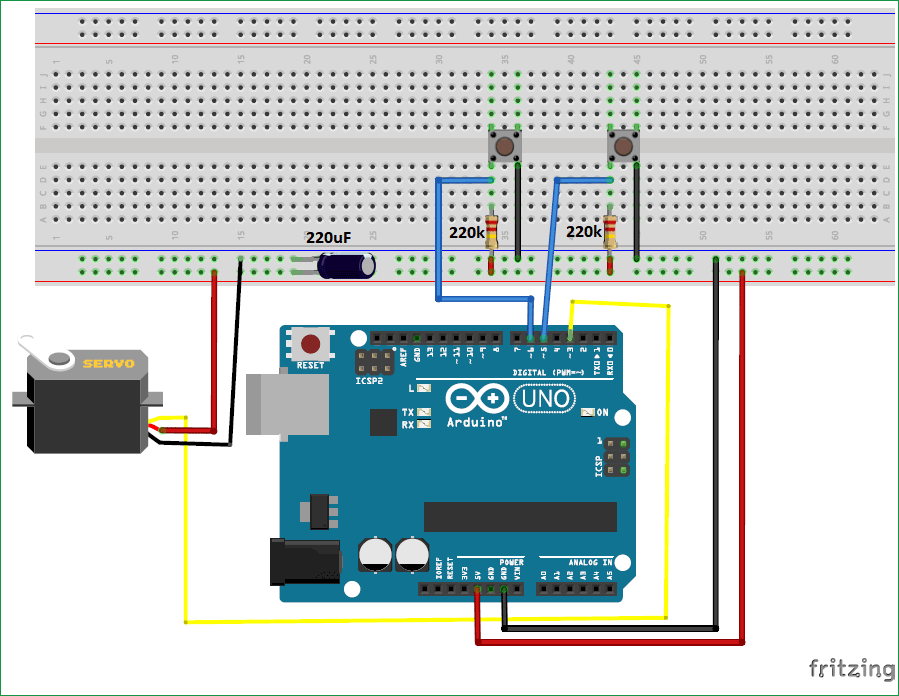
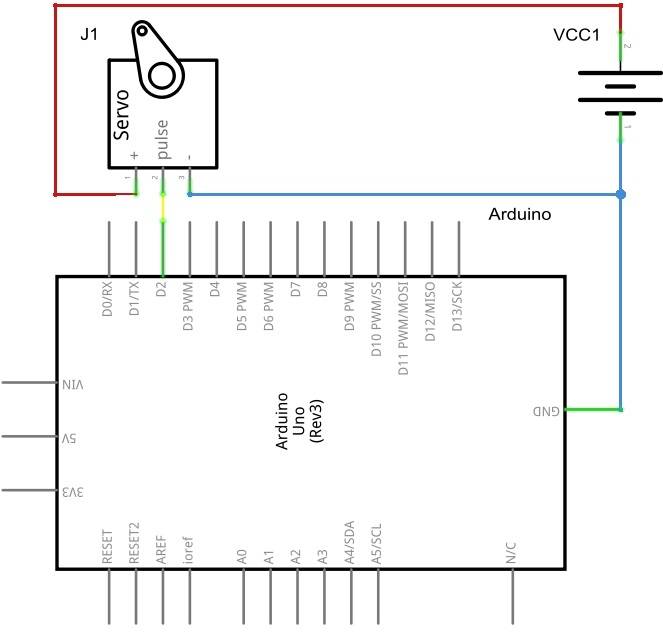
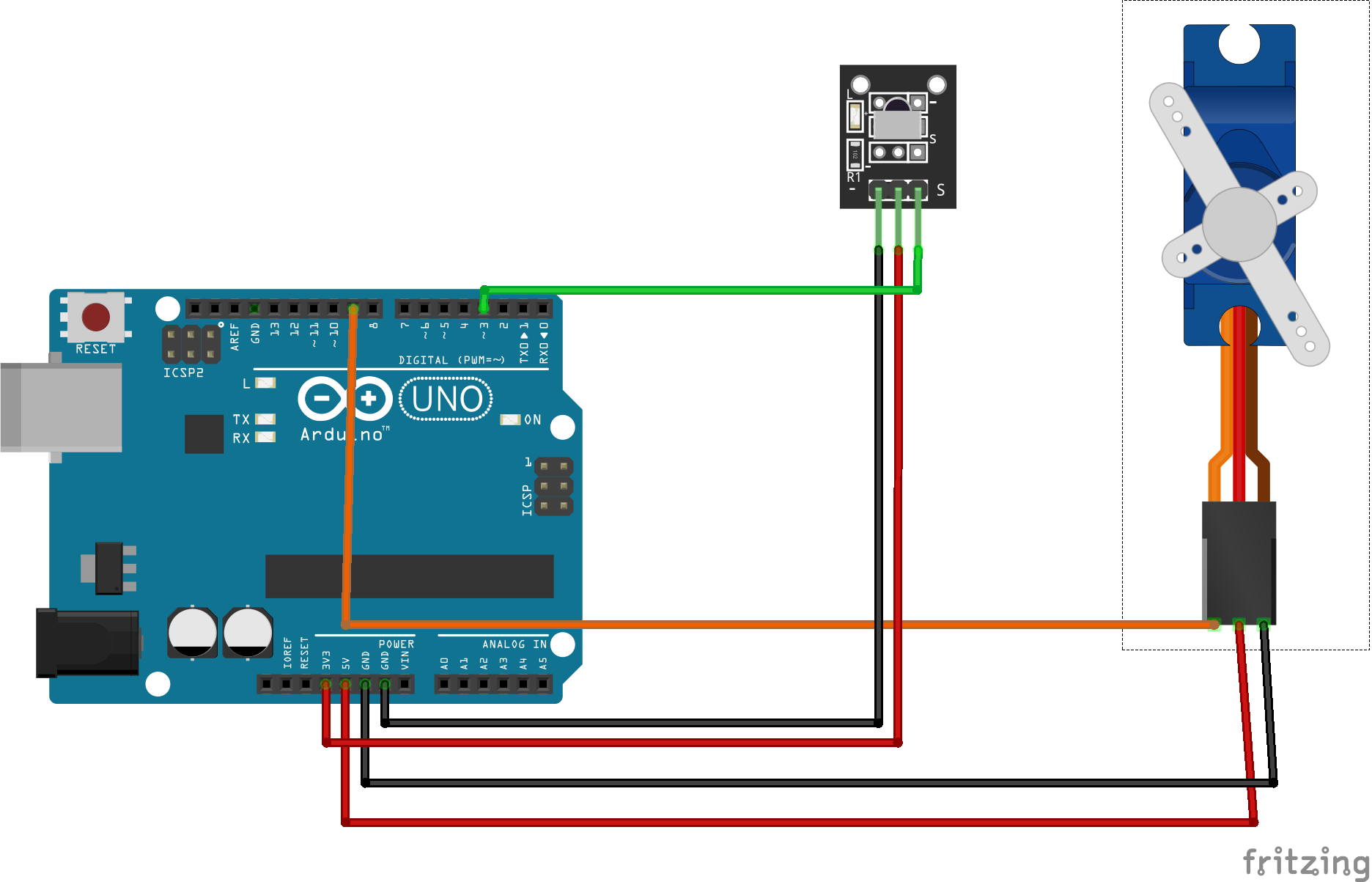
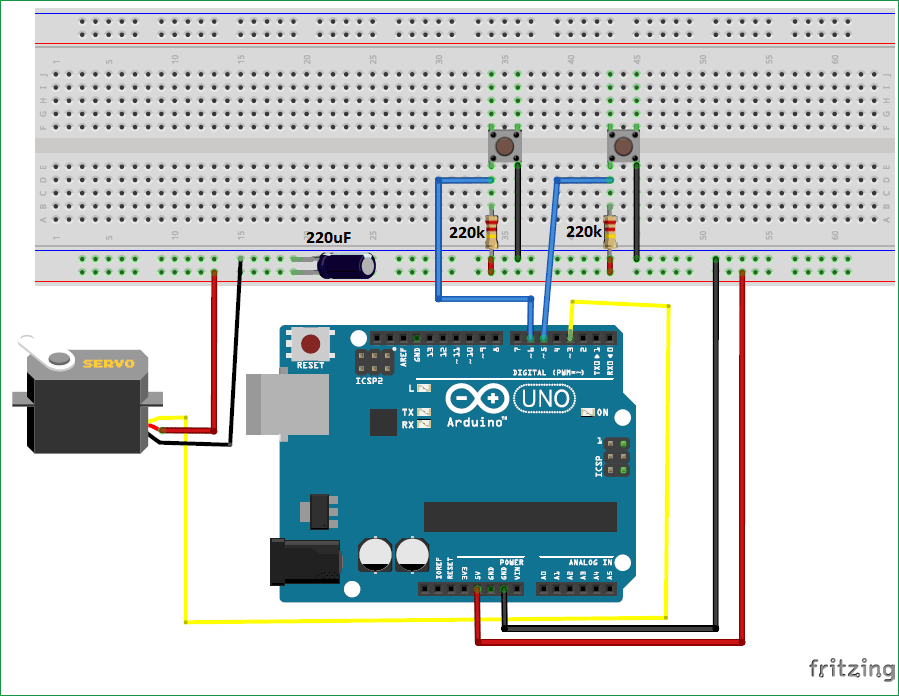
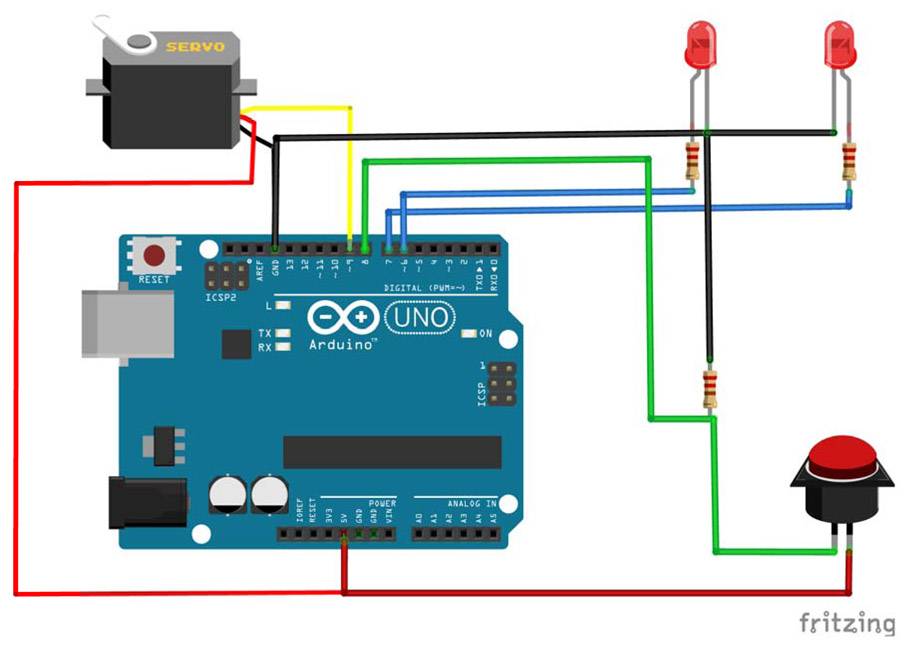
Работа схемы и программы
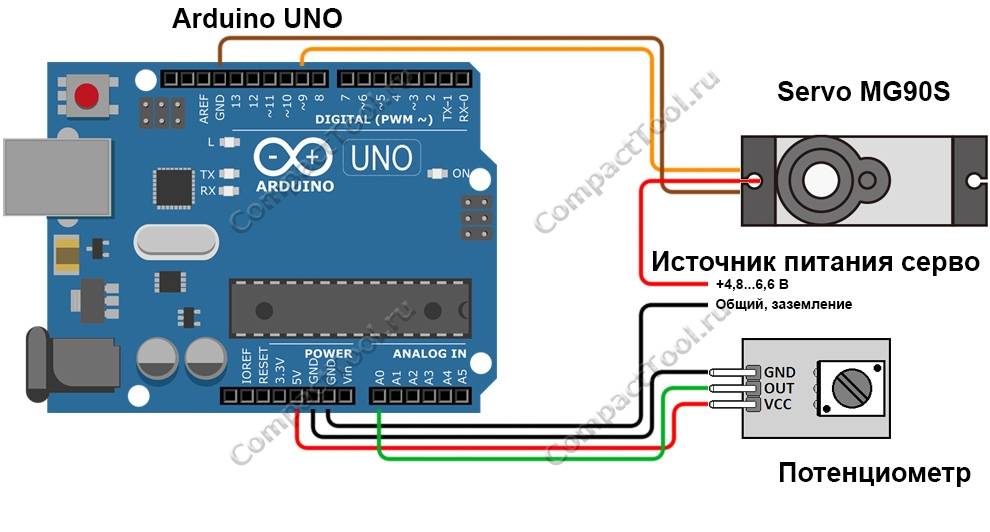
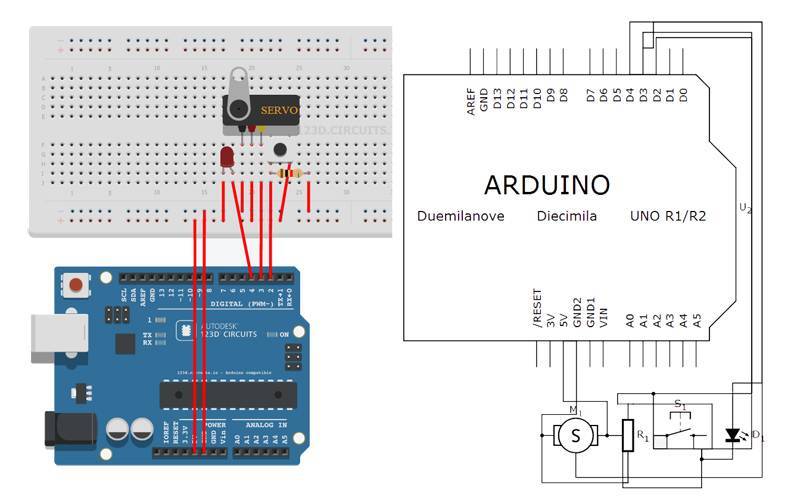
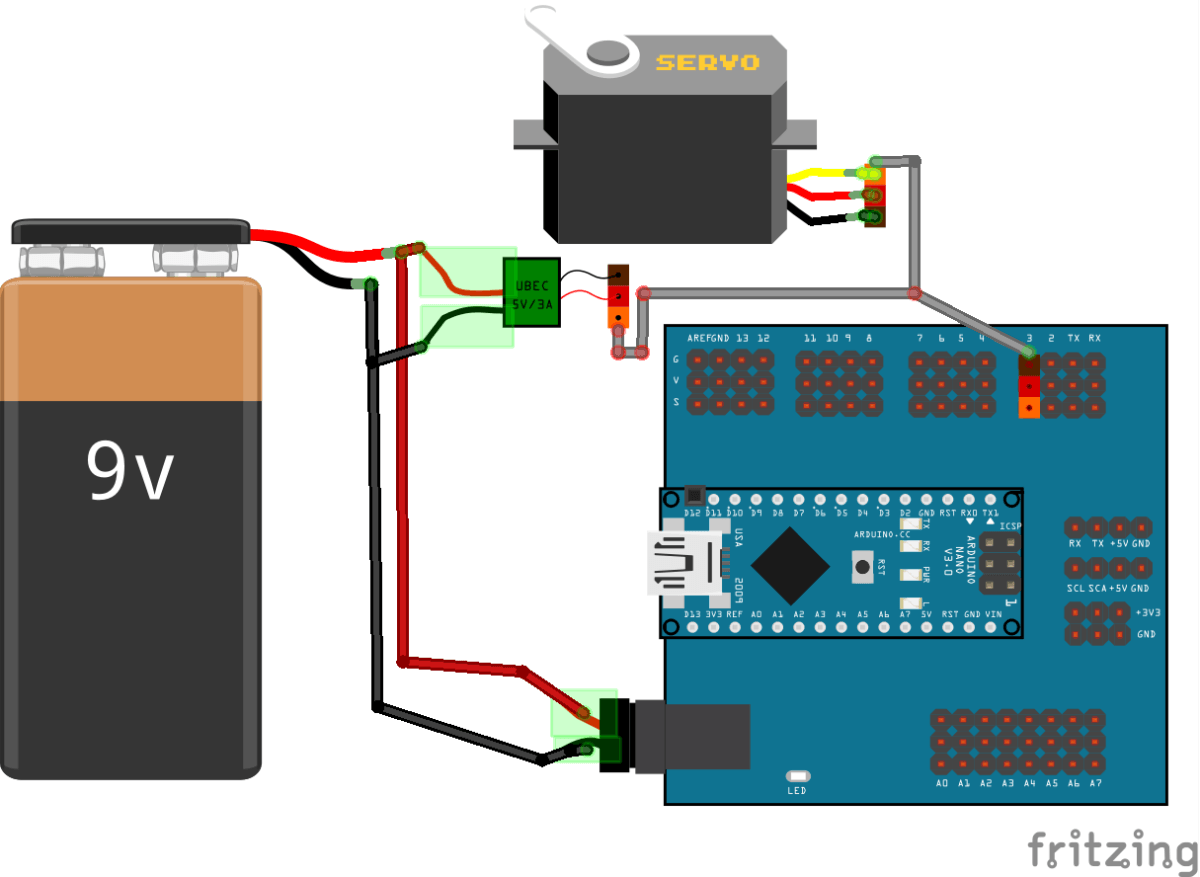
Схема устройства представлена на следующем рисунке.
 В отличие от управления серводвигателем с помощью микроконтроллеров AVR в случае использования платы Arduino нам уже нет необходимости вручную устанавливать значения регистров чтобы получить нужную частоту и коэффициент заполнения управляющих сигналов для серводвигателя. Для платформы Arduino для этих целей разработаны специальные библиотеки, с помощью которых эти функции реализуются достаточно просто – необходимо в программе просто подключить заголовочные файлы этих библиотек. В этом случае мы достаточно просто сможем устанавливать позицию сервомотора с помощью сигналов ШИМ.
В отличие от управления серводвигателем с помощью микроконтроллеров AVR в случае использования платы Arduino нам уже нет необходимости вручную устанавливать значения регистров чтобы получить нужную частоту и коэффициент заполнения управляющих сигналов для серводвигателя. Для платформы Arduino для этих целей разработаны специальные библиотеки, с помощью которых эти функции реализуются достаточно просто – необходимо в программе просто подключить заголовочные файлы этих библиотек. В этом случае мы достаточно просто сможем устанавливать позицию сервомотора с помощью сигналов ШИМ.
Для задействования всей мощи библиотек Arduino по управлению серводвигателями мы должны сделать следующие вещи:
Вначале мы должны установить частоту ШИМ сигнала для управления сервомотором – в данном случае это делается простым подключением заголовочного файла “#include
После этого мы должны определиться с именем сервомотора, которым будем управлять в программе. Делается это с помощью функции “Servo sg90sevo”, где ‘sg90servo’ – это выбранное имя для нашего сервомотора. Особенно актуально указание имен сервомоторов когда под нашим управлением будет находиться несколько сервомоторов (до 8 для Arduino) – в этом случае удобно их будет различать по данным им именам.
Далее мы должны сообщить Arduino к какому контакту подключен сервомотор, то есть на каком контакте необходимо будет формировать сигнал ШИМ. Мы это будем делать с помощью функции “Sg90.attach(3);”, которая указывает Arduino что сервомотор подключен к контакту PIN3.
Теперь все, что осталось сделать, это указать на какой угол необходимо повернуть ось серводвигателя, это можно сделать с помощью функции “Sg90.write(30);”, которая повернет ось серводвигателя на 30 градусов. В дальнейшем, если нам понадобится повернуть ось серводвигателя на какой-нибудь другой угол, то необходимо воспользоваться командой ”Sg90.write(needed_position_ angle);”. На представленной схеме у нас есть две кнопки, одна из них будет увеличивать угол поворота оси серводвигателя (вращать его против часовой стрелки), а другая – уменьшать (вращать его по часовой стрелке).
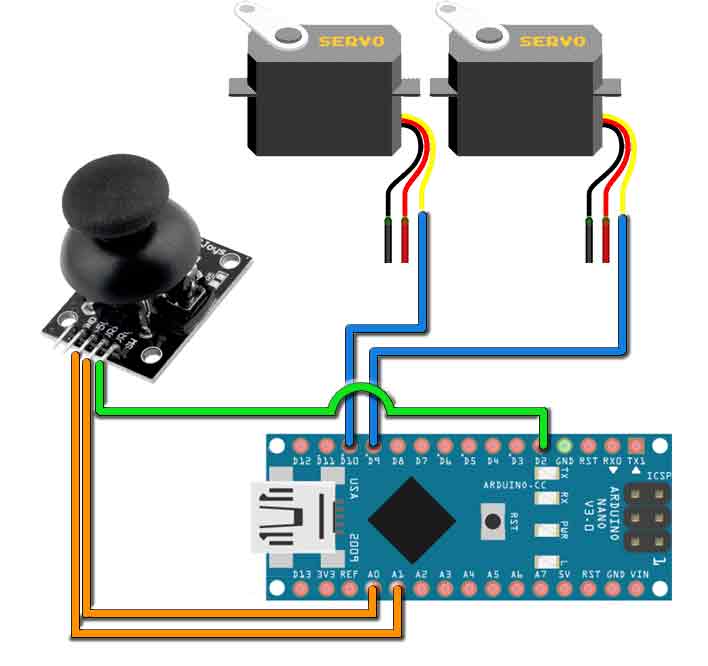
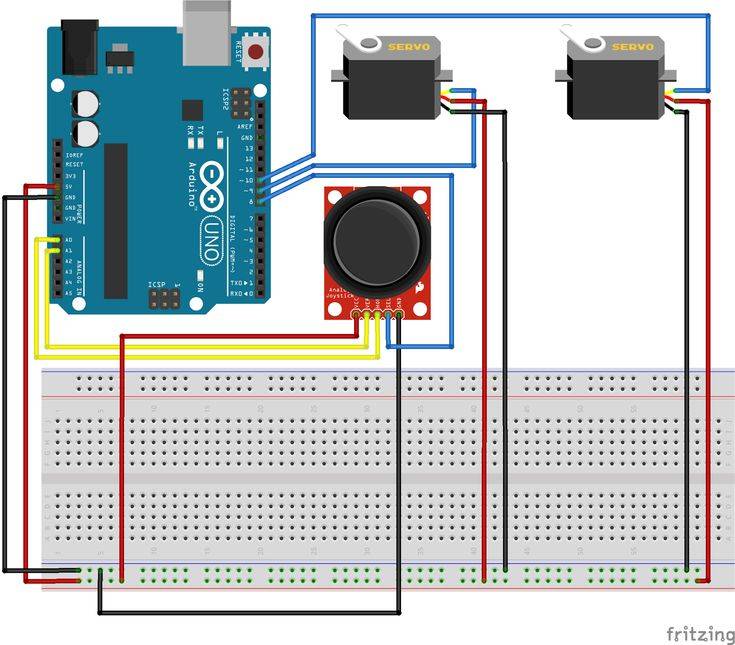
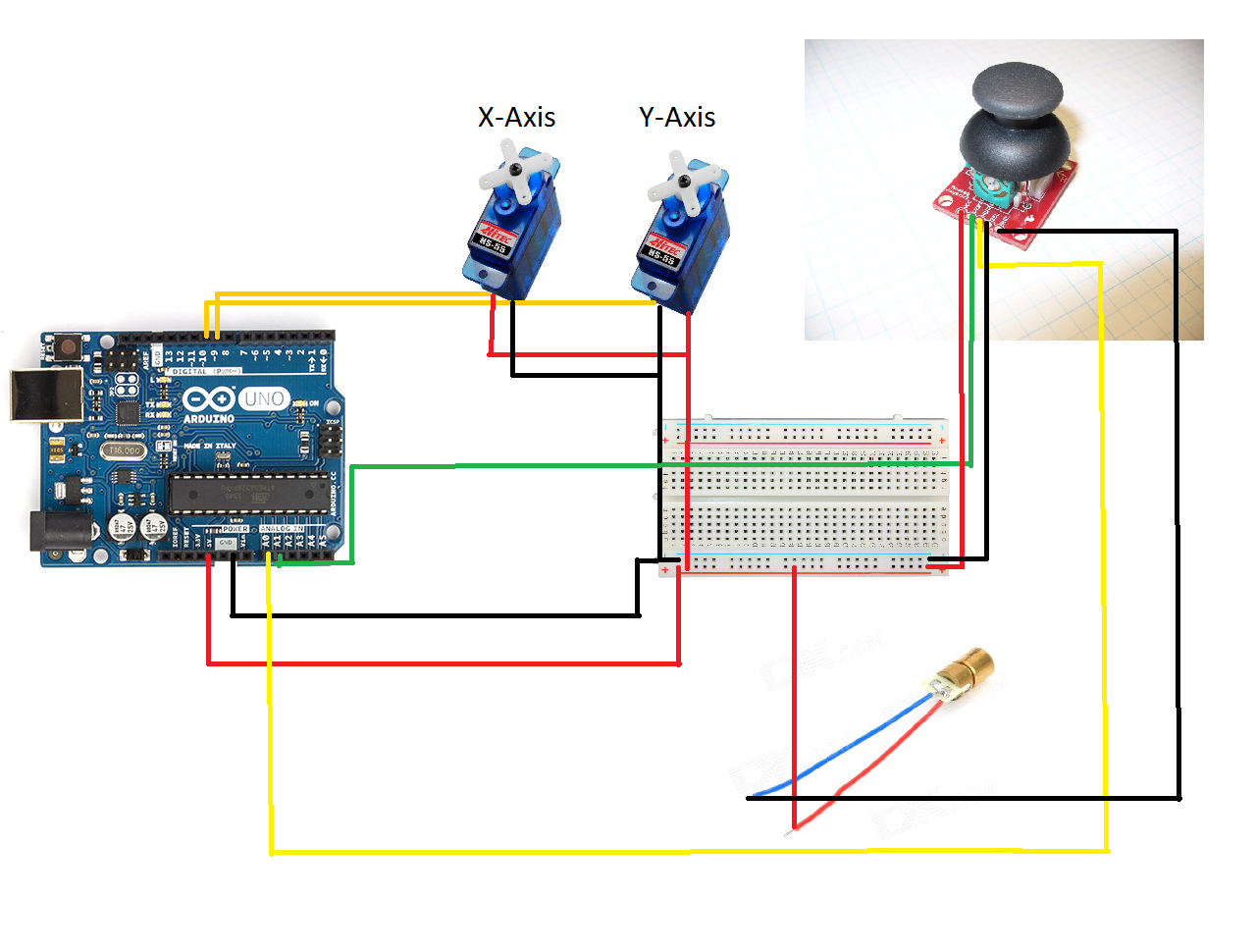
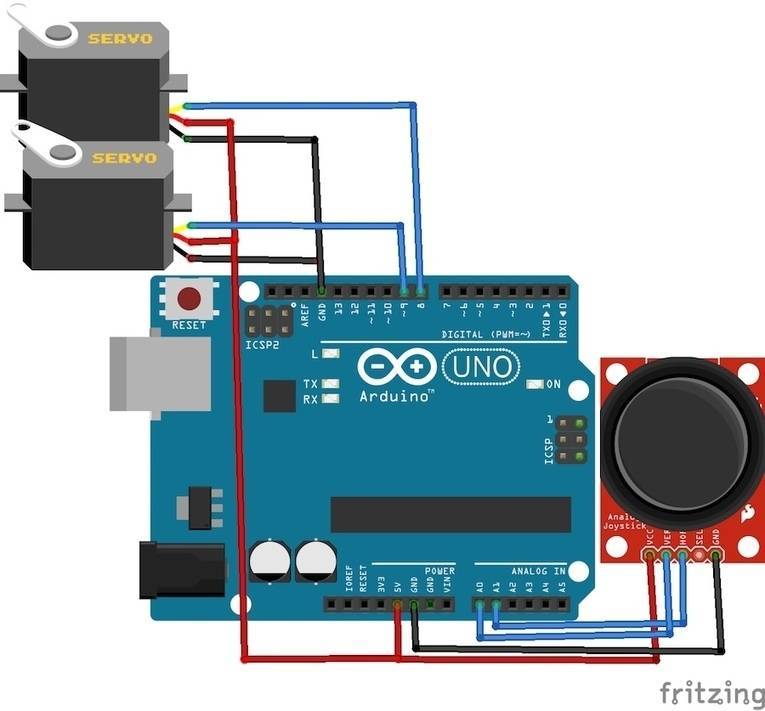
Подключаем джойстик
Представленная на рисунке ниже схема подключения может вас немного смутить. Но поверьте, все не так сложно как кажется на первый взгляд. Опять таки для подключения используем монтажную плату.
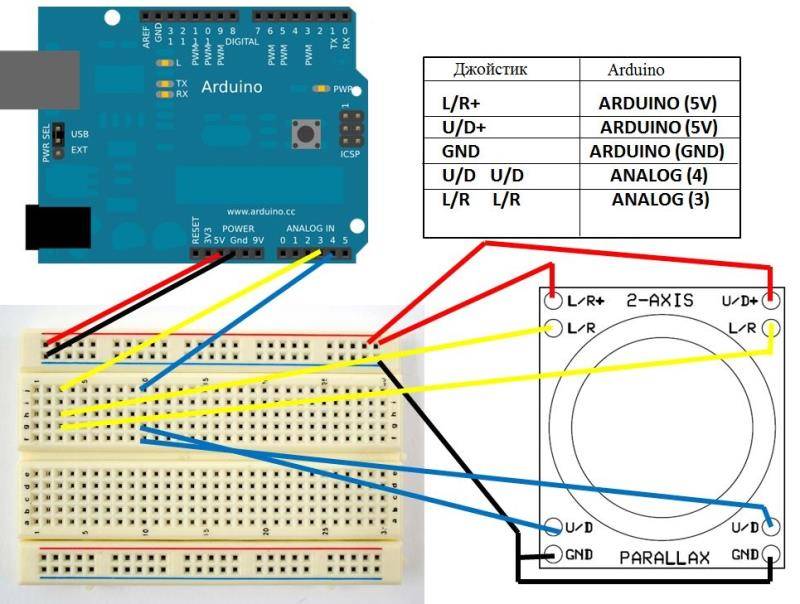
1. На модуле джойстика один выход U/R+ и один L/R+. Это выходы для подключения питания. Эти выходы подключаются к пину 5V на Arduino.
2. Также есть два разъема L/R и два разъема U/D. Они подключаются к аналоговым входам А3 и А4.
3. Земля на джойстике подключается к земле на Arduino.
Не забудьте перепроверить подключение. Помните, что большинство ошибок в проектах возникает именно из-за неправильного подключения. Особенно если вы используете монтажную плату, которая обрастает кучей коннекторов.
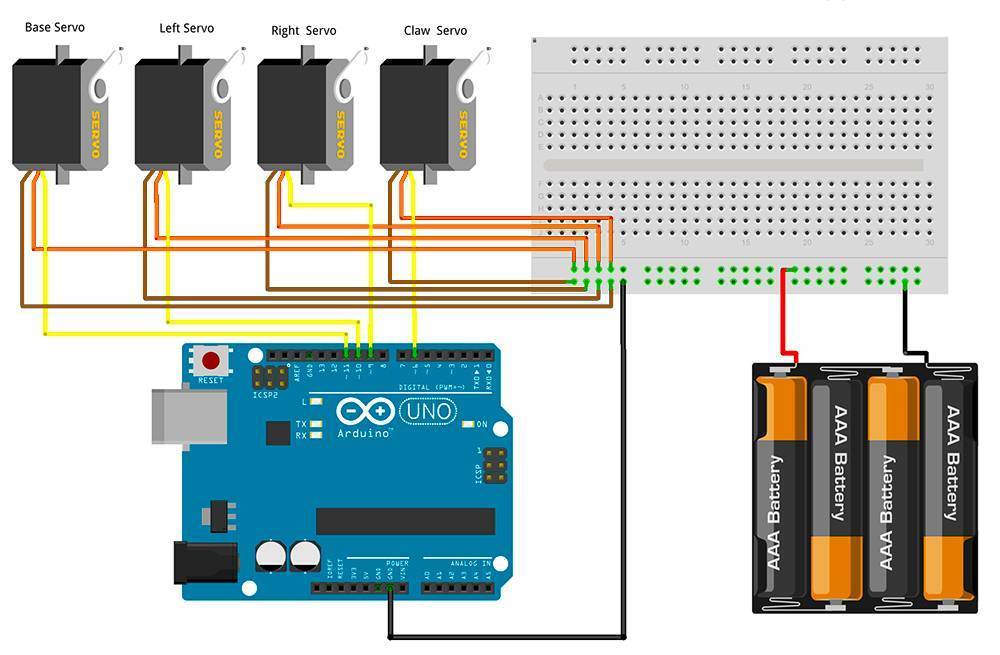
Как работает клешня «хватайки»
Как конкретно работает клешня, в профессиональном аппарате, я не разглядел, поскольку механика была прикрыта защитным кожухом, поэтому пришлось поэкспериментировать.
Поломав некоторое время голову, получилось придумать более-менее рабочий вариант: клешня состоит из четырех «пальцев», которые одним концом фиксируются на неподвижной раме. Так же добавил крестовину, с ней «пальцы» имеют шарнирное соединение примерно посередине. К неподвижной части рамы жестко зафиксировал сервопривод, качалка которого опускает и поднимает ось. Крестовина в свою очередь жестко закреплена к оси и вместе с ней совершает движения вверх и вниз, из-за чего и происходит сжатие и раскрытие клешни. Чтобы было понятнее, ниже находится картинка с клешней. Изображение можно вращать с помощью мышки, зажав ЛКМ и перемещая влево или вправо.
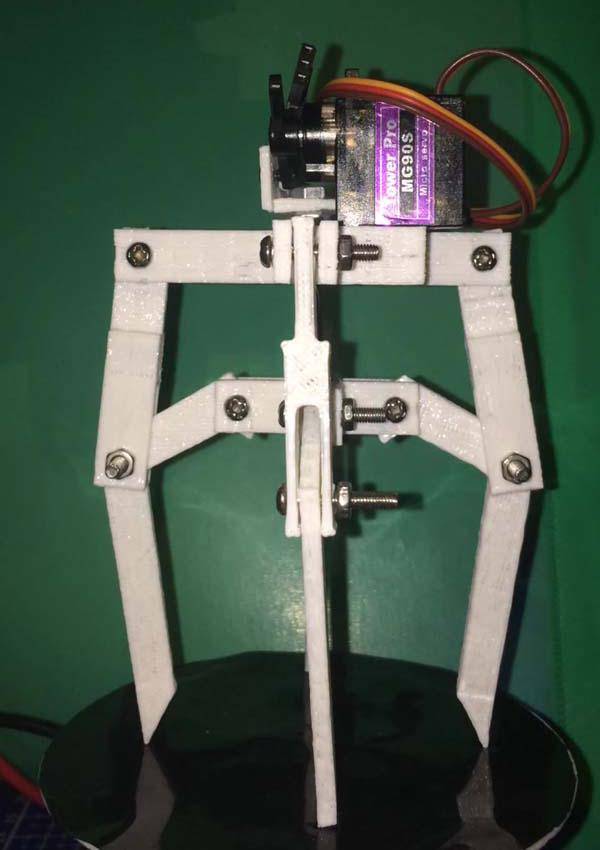
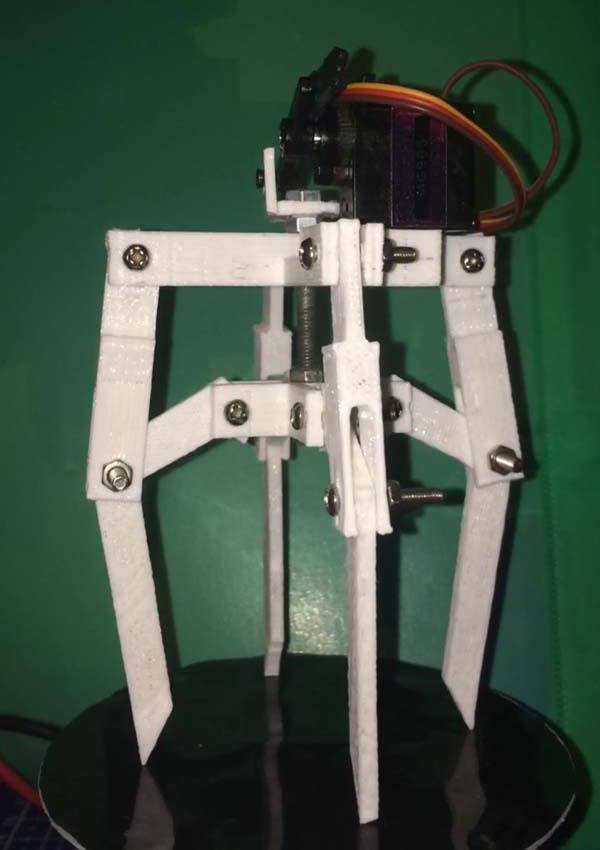









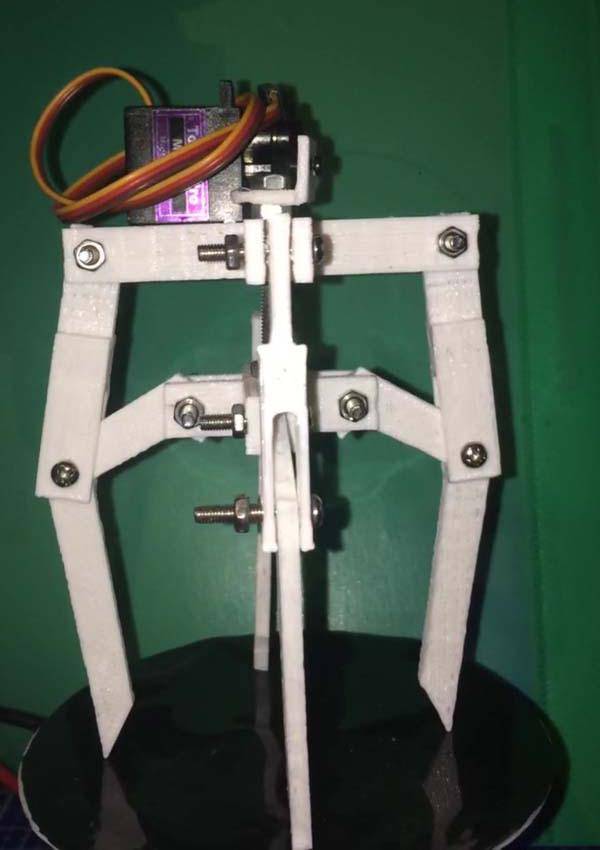

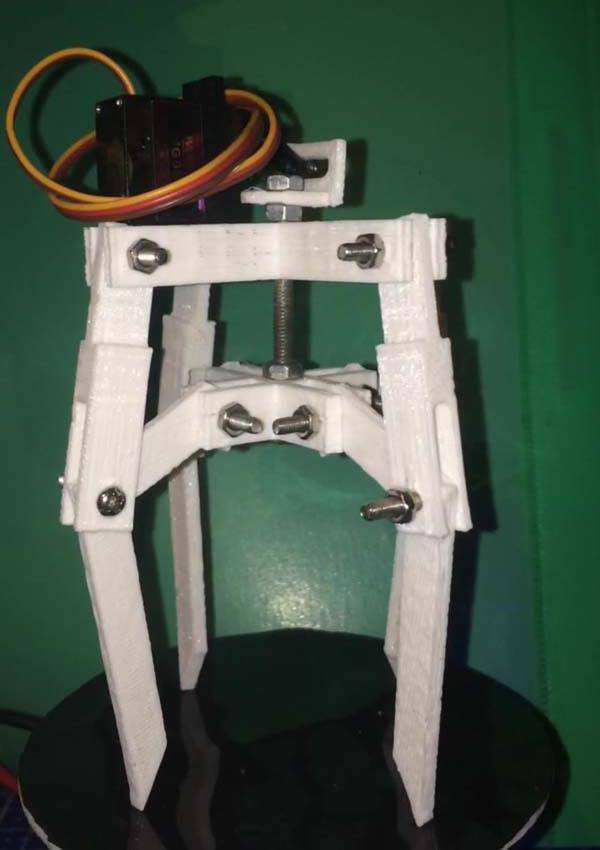






С изготовлением клешни особо не мучался и напечатал ее на 3D принтере.
Скетч для сервопривода Ардуино
Скетч ниже заставит сервопривод переместиться в позицию 0 градусов, подождать 1 секунду, затем повернуться на 90 градусов, подождать еще одну секунду, после повернуться на 180 градусов и перейти в первоначальное положение.
Также дополнительно мы используем библиотеку servo – скачайте ниже или в нашем разделе Библиотеки.
Содержимое zip-файла размещается в папку arduino-xxxx/hardware/liraries.
Скетч № 1
// Подклоючаем библиотеку Servo #include// Пин для сервопривода int servoPin = 3; // Создаем объект Servo Servo1; void setup() { // Нам нужно подключить сервопривод к используемому номеру пина Servo1.attach(servoPin); } void loop(){ // 0 градусов Servo1.write(0); delay(1000); // 90 градусов Servo1.write(90); delay(1000); // 180 градусов Servo1.write(180); delay(1000); }
Если сервомотор подключен к другому цифровому контакту, просто измените значение servoPin на значение используемого цифрового вывода.
Помните! Использование библиотеки Servo автоматически отключает функцию PWM для PWM-контактов 9 и 10 на Arduino UNO и аналогичных платах.
Наш код просто объявляет объект и затем инициализирует сервопривод с помощью функции servo.attach(). Мы не должны забывать подключать серво библиотеку. В цикле мы устанавливаем сервопривод на 0 градусов, ждем, а затем устанавливаем его на 90, а затем на 180 градусов.
Скетч № 2
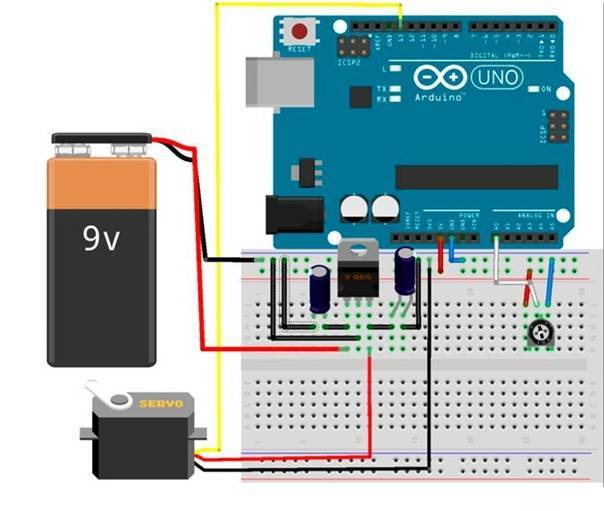
Второй скетч для варианта с Arduino Diecimilia ниже.
Нам достаточно будет скачать и подключить библиотеку из архива:
Сам код такой:
#includeServo servo1; Servo servo2; void setup() { pinMode(1,OUTPUT); servo1.attach(14); //analog pin 0 //servo1.setMaximumPulse(2000); //servo1.setMinimumPulse(700); servo2.attach(15); //analog pin 1 Serial.begin(19200); Serial.println("Ready"); } void loop() { static int v = 0; if ( Serial.available()) { char ch = Serial.read(); switch(ch) { case '0'...'9': v = v * 10 + ch - '0'; break; case 's': servo1.write(v); v = 0; break; case 'w': servo2.write(v); v = 0; break; case 'd': servo2.detach(); break; case 'a': servo2.attach(15); break; } } Servo::refresh(); }
vri-cnc.ru
Шаговые двигатели – дешевле. Однако сервоприводы обладают широким рядом достоинств, в том числе высокой производительностью и точностью позиционирования. Так что же выбрать?
Что такое шаговый электродвигатель
 Шаговый электродвигатель – это безщеточный синхронный электродвигатель постоянного тока, имеющий несколько обмоток статора. При подаче тока в одну из обмоток ротор поворачивается, а затем фиксируется в определенном положении. Последовательное возбуждение обмоток через контроллер управления шаговым двигателем позволяет вращать ротор на заданный угол.
Шаговый электродвигатель – это безщеточный синхронный электродвигатель постоянного тока, имеющий несколько обмоток статора. При подаче тока в одну из обмоток ротор поворачивается, а затем фиксируется в определенном положении. Последовательное возбуждение обмоток через контроллер управления шаговым двигателем позволяет вращать ротор на заданный угол.
Шаговые электродвигатели широко применяются в промышленности, так как имеют высокую надежность и длительный срок службы. Главное преимущество шаговых двигателей – точность позиционирования. При подаче тока на обмотки ротор провернется строго на определенный угол.
Положительные стороны шагового двигателя
·Устойчивость в работе;
·Высокий крутящий момент на малых и нулевых скоростях;
·Быстрый старт, остановка и реверс;
·Работа под высокой нагрузкой без риска выхода из строя;
·Единственный механизм износа, влияющий на длительность эксплуатации – подшипники;
·Невысокая стоимость.
Отрицательные стороны шагового двигателя
·Высокий уровень шума;
·Возможность появления резонанса;
·Постоянный расход электроэнергии вне зависимости от нагрузки;
·Падение крутящего момента на высоких скоростях;
·Отсутствие обратной связи при позиционировании;
·Низкая пригодность к ремонту.
Что такое серводвигатель (сервопривод)
 Серводвигатель (сервопривод) – это электрический мотор с управлением через обратную отрицательную связь, которая позволяет точно управлять параметрами движения, чтобы достичь необходимой скорости или получить нужный угол поворота. В состав серводвигателя входят непосредственно сам электродвигатель, датчик обратной связи, блок питания и управления.
Серводвигатель (сервопривод) – это электрический мотор с управлением через обратную отрицательную связь, которая позволяет точно управлять параметрами движения, чтобы достичь необходимой скорости или получить нужный угол поворота. В состав серводвигателя входят непосредственно сам электродвигатель, датчик обратной связи, блок питания и управления.
Конструктивные особенности электродвигателей для сервопривода мало чем отличаются от обычных электродвигателей имеющих статор и ротор, работающих на постоянном и переменном токе, с щетками и без щеток. Особую роль здесь играет датчик обратной связи, который может быть установлен как непосредственно в самом двигателе и передавать данные о положении ротора, так и определять его позиционирование по внешним признакам. С другой стороны, работа серводвигателя немыслима без блока питания и управления (он же инвертор или сервоусилитель), который преобразует напряжение и частоту тока, подаваемого на электродвигатель, тем самым управляя его действием.
Положительные стороны серводвигателя (сервопривода)
·Высокая мощность при малых размерах;
·Высокий крутящий момент;
·Быстрый разгон и торможение;
·Постоянное и бесперебойное отслеживание положения;
·Низкий уровень шума, отсутствие вибраций и резонанса;
·Широкий диапазон скорости вращения;
·Высокая скорость разгона;
·Точное позиционирование;
·Стабильная работа в широком диапазоне скоростей;
·Малая масса и компактная конструкция;
·Низкий расход электроэнергии при малых нагрузках.
Отрицательные стороны серводвигателя (сервопривода)
·Требовательность к периодическому обслуживанию (например, с заменой щеток);
·Дорогостоящий ремонт;
·Сложность устройства (наличие датчика, блока питания и управления) и логики его работы.
·Высокая стоимость.
Сервопривод или шаговый двигатель?
Сравнивая характеристики сервопривода и шагового двигателя, следует обратить внимание, прежде всего, на их производительность и стоимость. Для производства фасадов МДФ на небольшом предприятии, работающем с малыми объемами, думаю, нет необходимости переплачивать за установку на фрезерный станок с ЧПУ дорогостоящих серводвигателей
С другой стороны, если предприятие стремится выйти на максимально возможные объемы производства, то дешевить на низкопроизводительных шаговых двигателях для ЧПУ не имеет смысла
С другой стороны, если предприятие стремится выйти на максимально возможные объемы производства, то дешевить на низкопроизводительных шаговых двигателях для ЧПУ не имеет смысла
Для производства фасадов МДФ на небольшом предприятии, работающем с малыми объемами, думаю, нет необходимости переплачивать за установку на фрезерный станок с ЧПУ дорогостоящих серводвигателей. С другой стороны, если предприятие стремится выйти на максимально возможные объемы производства, то дешевить на низкопроизводительных шаговых двигателях для ЧПУ не имеет смысла.
Скетч для управления сервоприводом в Arduino
Непосредственное управление сервоприводом путем изменения ширины импульса в эскизе — довольно нетривиальная задача, но, к счастью, у нас есть большая библиотека сервоприводов, встроенная в среду разработки Arduino. Все нюансы программирования и работы со слугами мы рассмотрим в отдельной статье. Вот простейший пример использования сервопривода.
Алгоритм работы прост:
- Во-первых, давайте включим Servo.h
- Создайте объект класса Servo
- В блоке конфигурации укажите, к какому выводу подключен сервопривод
- Мы используем методы объекта обычным для C ++ способом. Самым популярным является метод записи, в который мы вводим целочисленное значение в градусах (для сервопривода 360 эти значения будут интерпретироваться по-разному).
Пример простого скетча для работы с сервоприводом
Пример проекта, в котором мы сначала сразу устанавливаем серводвигатель на нулевой угол, а затем поворачиваем его на 90 градусов.
#включать Слуга слуга; // Создаем объект void setup () {servo.attach (9); // Сообщаем сервообъекту, что сервопривод подключен к выводу 9 servo1.write (0); // Устанавливаем начальную позицию} void loop () {servo.write (90); // Повернуть сервопривод на 90 градусов delay (1000); серво запись (1800); задержка (100); серво запись (90); задержка (1000); servo.write (0); задержка (1000); }
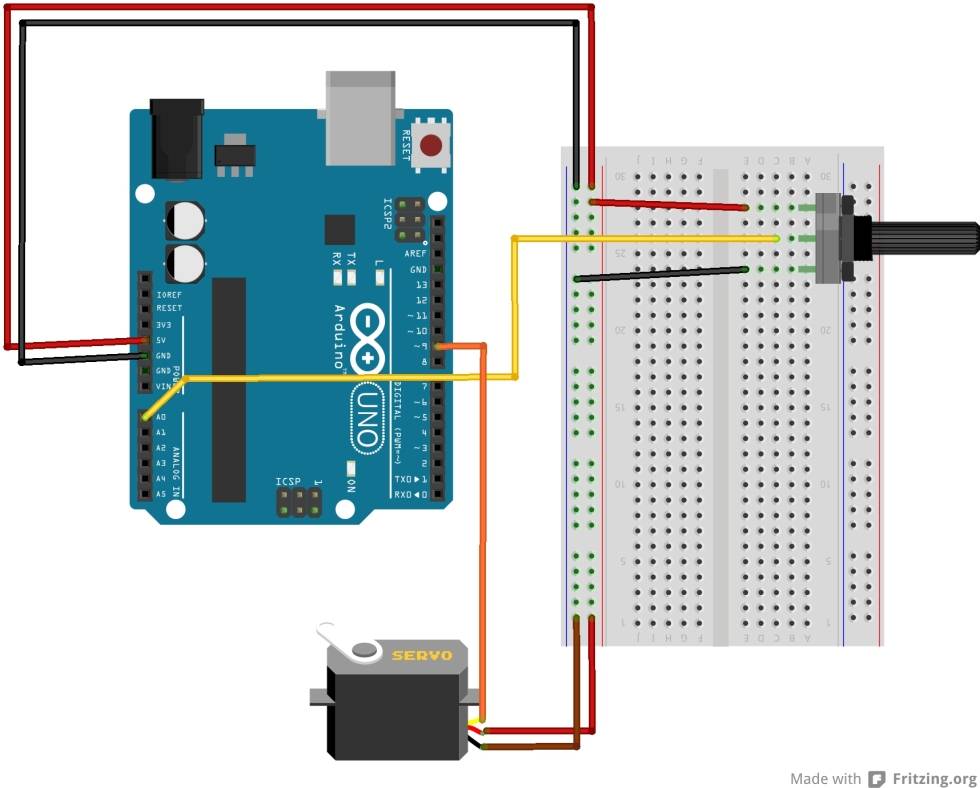
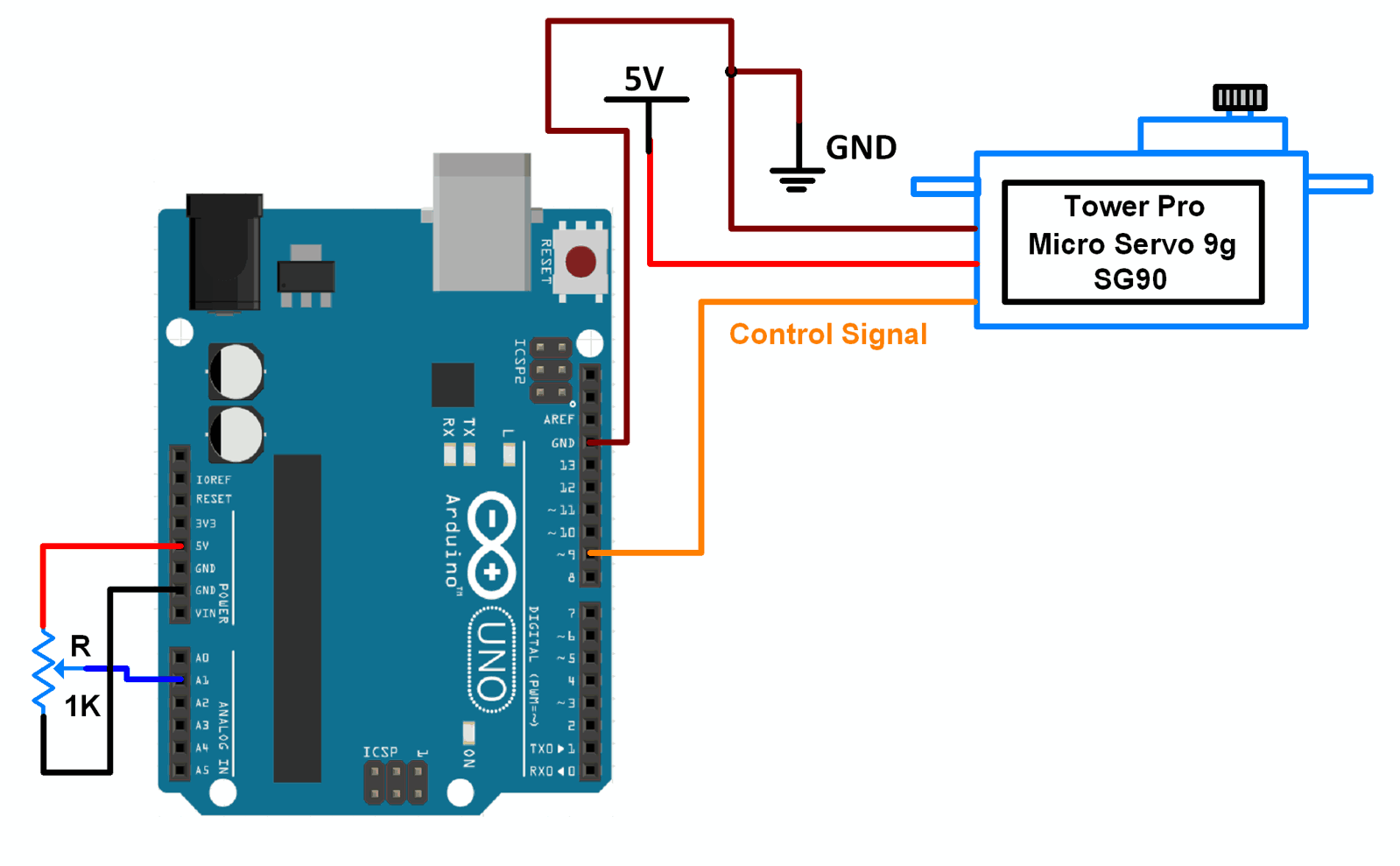
Управление сервоприводом с помощью потенциометра
В этом примере мы поворачиваем сервопривод в соответствии со значением, полученным от потенциометра. Мы читаем значение и преобразуем его в угол с помощью функции карты:
Как управлять сервоприводом?
Вообще, сервоприводы нужны в первую очередь, моделистам, для управления положениями закрылок, рулей и вертолетных лопастей. Вал мотор-редуктора жестко связан с движком переменного резистора. Резистор подключен в схему контроля и своим текущим сопротивлением сообщает о текущем положении вала. На схему контроля поступают сигналы управления, сообщающие, в какое положение нужно повернуть выходной вал (и резистор соответственно). Схема подает питание на моторчик и крутит им до нужного угла (сопротивления резистора), там замирает и, если что-нибудь повернет вал из нужной точки, вернет ее на место. При этом управлять сервой очень просто – у нее есть три провода:
- земля (коричневый/черный),
- питание +5 вольт (красный),
- сигнальный (оранжевый/желтый/белый).
Управление импульсное, по сигнальному проводу. Особая прелесть состоит в том, что сигнальный провод слаботочный – импульсы можно давать непосредственно с ноги микроконтроллера. Чтобы удерживать определенную позицию – импульс должен повторяться. Все это может звучать сложно, но на деле довольно просто. Задача упрощается еще и потому, что в комплекте штатных библиотек Arduino IDE уже есть библиотека Servo для управления сервомашинками (www.arduino.cc/en/Reference/Servo). В результате очень просто можно набросать код, который заставит серву делать поворот от 0 до 180 градусов и обратно:
Servo myservo; // создаем объект для контроля сервы
// максимальное количество таких объектов – 8
int pos = 0; // переменная для хранения позиции сервы
void setup()
{
myservo.attach(9); // серва подключена к девятому пину
}
void loop()
{
for(pos = 0; pos < 180; pos += 1) // от 0 до 180 градусов
{ // с шагом в 1 градус
myservo.write(pos); // устанавливаем положение
delay(15); // ждем 15 мс пока серва займет новое положение
}
// и обратно
for(pos = 180; pos>=1; pos-=1) // от 180 до 0 градусов
{
myservo.write(pos);
delay(15);
}
}
Перейдём к практике
В наборе, который мы с вами распаковывали ранее мне достался сервопривод Tower Pro SG90 — это одна из популярнейших моделей для хобби, поэтому китайцы кладут их во все подобные наборы. Отдельно он стоит 3-4 доллара.
При всей своей миниатюрности, SG90 достаточно «сильный» и момент на валу аж 1.8 кг/см.
В комплекте с ним есть набор креплений для соединения с механизмами: четырёхсторонний (в виде +), двухсторонний (в виде —) один односторонний, что вы можете наблюдать на фото выше. Кроме них в комплект всегда кладут крепежные винтики. На валу есть шлицы для крепления оснастки, чтобы она не проворачивалась.
Сегодня нам понадобится:
Сервопривод SG90 — 1 штука;
Плата Arduino, любая, у меня есть UNO — 1 штука;
Перемычки или провода для содинения — 5-10 штук;
Потенциометр, например, на 10К (на самом деле его сопротивление не слишком важно) — 1 штука.
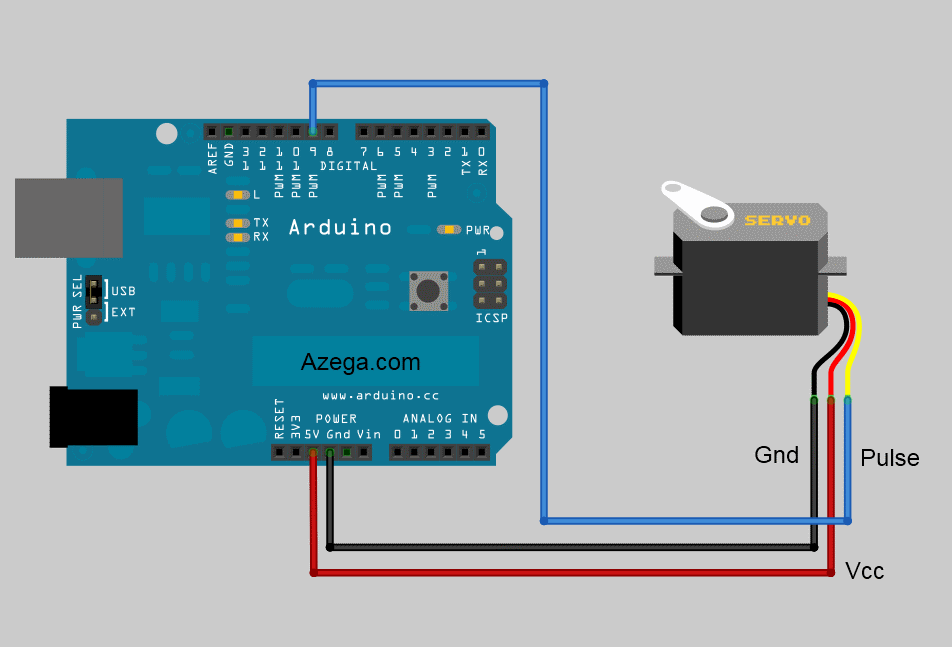
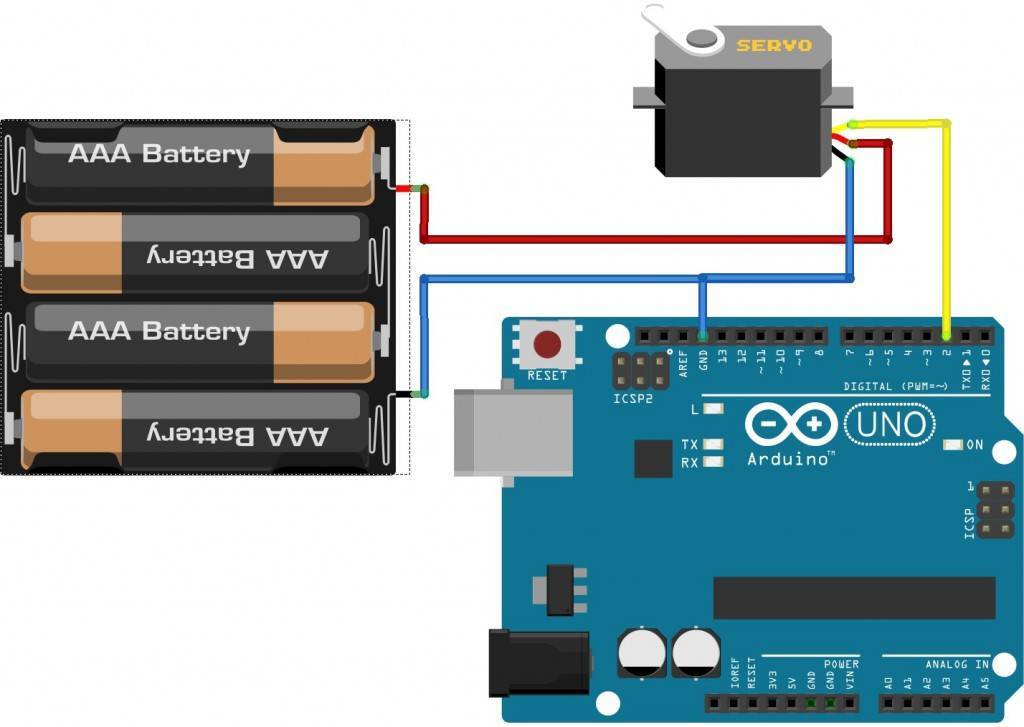
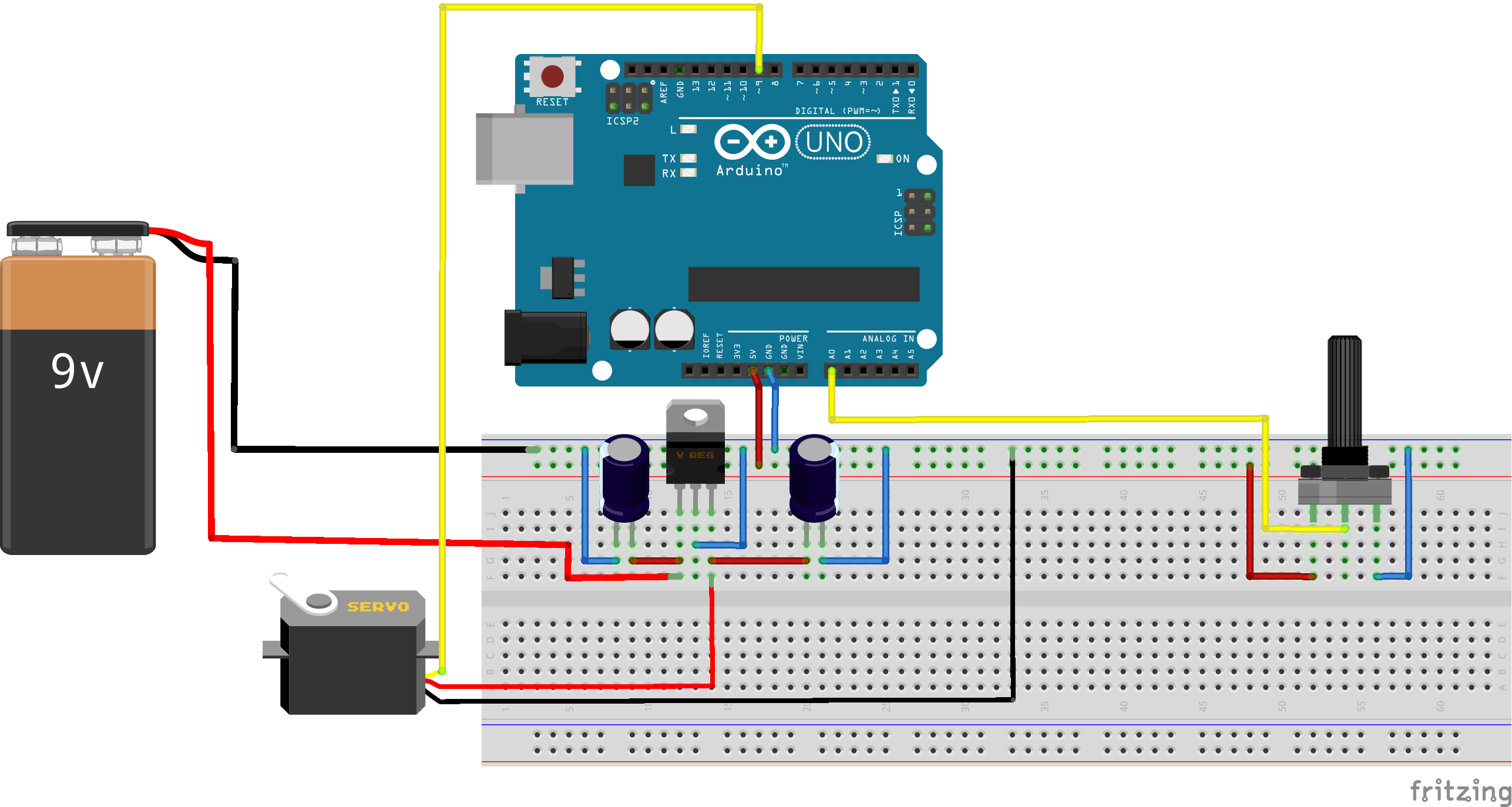
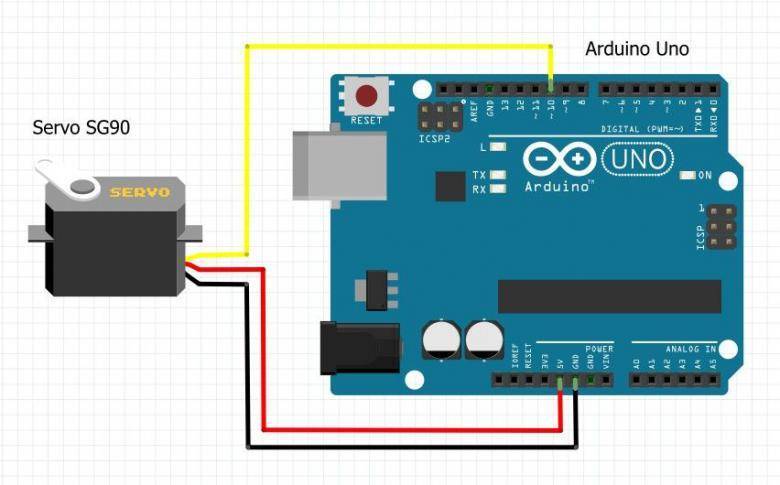
Если вы будете питать серву напрямую от платы, то подключайте её к пинам 5V красным проводом, GND – коричневым (черным) проводом, а жёлтый провод — это сигнал, его можно к любому пину, хоть цифровому, хоть аналоговому, хоть с ШИМ, хоть без него.
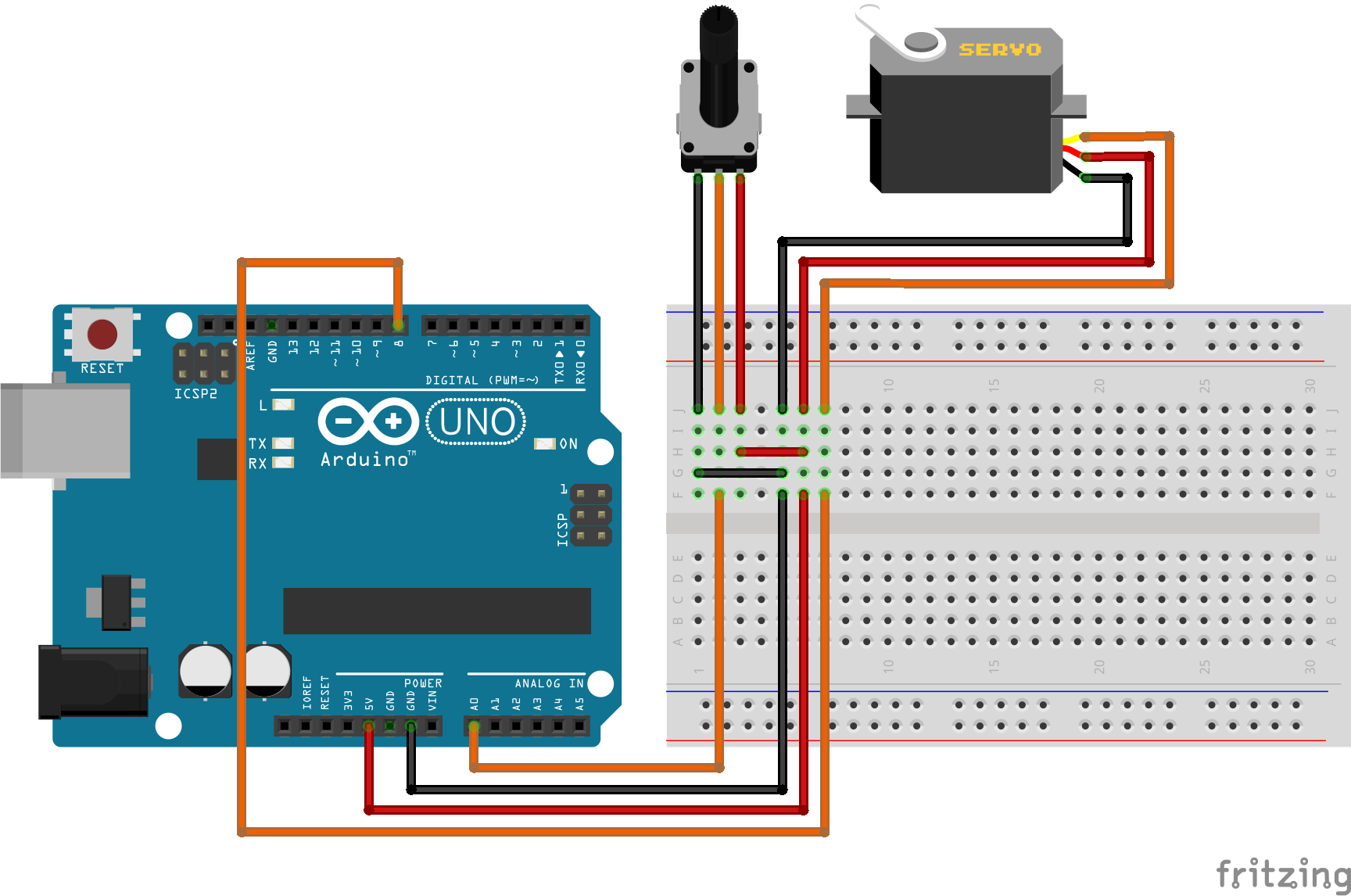
Я же заблаговременно собрал схему на макетной плате и подключил к ней потенциометр, которым мы далее будем задавать положение вала. Средний вывод потенциометра я подключил к аналоговому пину A0 ардуино, а сигнальный провод сервопривода – к 9 пину. Схему приведу ниже.
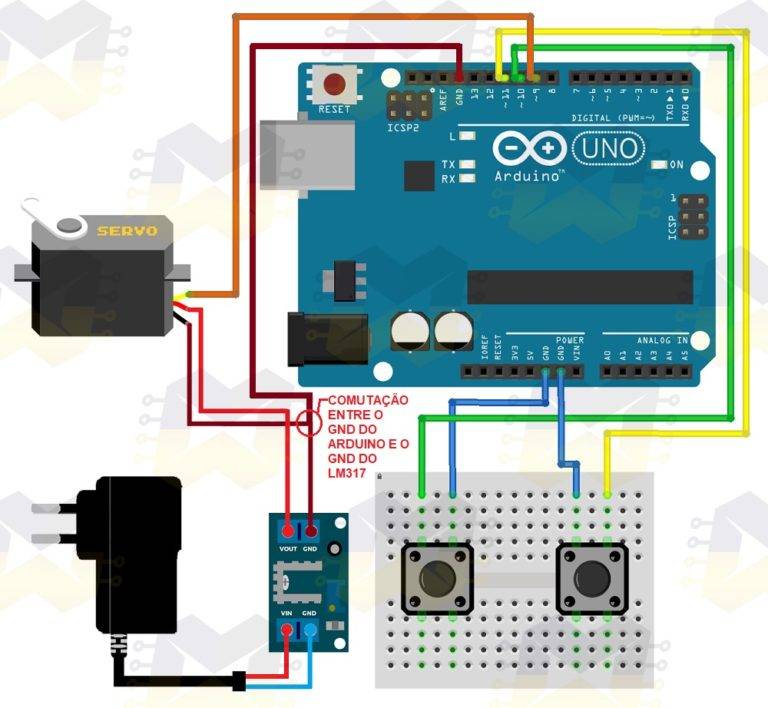
![Сервоприводы pdm постоянного вращения: особенности применения и примеры кода [амперка / вики]](https://svet-mr.ru/wp-content/uploads/a/7/3/a7382b95015fc0d6a54e47e8aa8344c8.jpeg)
Проверяем работоспособность сервопривода, для этого заходим в Arduino IDE, открываем пример из стандартного набора под названием «Servo→Sweep»
По умолчанию в этом примере выставлено, что сигнальный провод подключается к 9-му пину, если вы подключили к другому – исправьте вот это значение в коде:
Код несложный, привожу его ниже с русскими комментариями.
// Можно создать до 12 таких объектов и подключить столько же приводов
//для объекта myservo подключен к 9 пину
// чтобы привод повернулся на угол, указанный в pos
В результате сервопривод вращается от одного крайнего положения до другого. Скорость перемещения можно изменять либо путем изменения задержки между шагами (delay), либо путем изменения шага, а именно правкой последнего значения в аргументах цикла — for (pos = 180; pos >= 0; pos -= 1). На видео я показал примеры с разными значениями задержки.
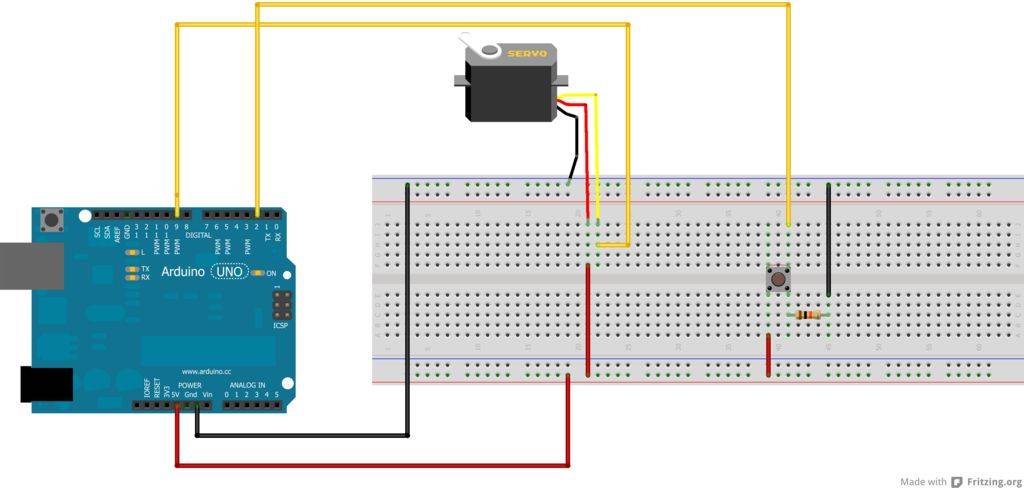
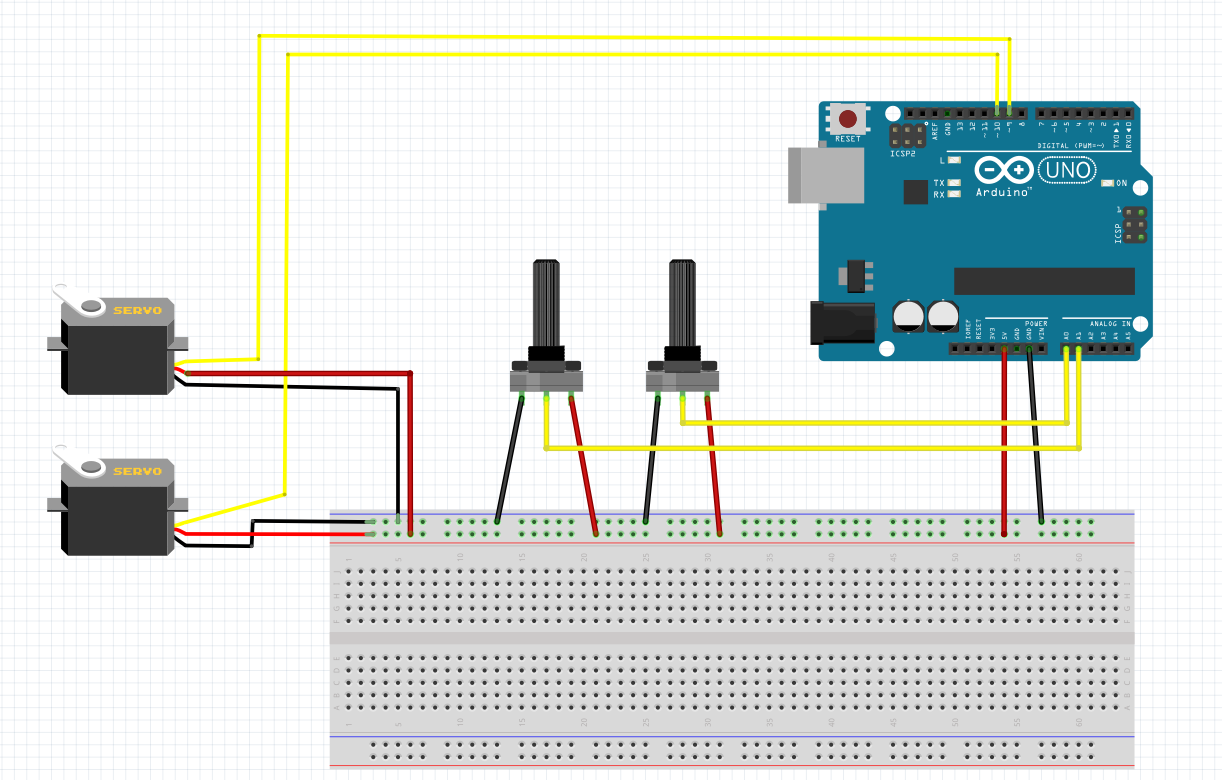
Дальше мы откроем другой из стандартных примеров — knob. Здесь-то нам и понадобится потенциометр. Ниже приведена схема подключения для этого примера.
Разберем код. Первая его часть, где подключается библиотека и назначается пин, к которому подключен управляющий провод сервопривода не изменилась, и её я комментировать не буду.
// к которому подключено потенциометр (пин А0)
// подробнее мы рассматривали этот вопрос в этой статье —
// до необходимых нам градусов — от 0 до 180
// значениями, полученными с аналогового входа
Библиотека Servo.h по умолчанию встроена в Arduino IDE, разберем основные её команды:
Servo myservo – вместо «myservo» может быть любое слово, это название вашего сервопривода.
attach() — привязать переменную, объявленную предыдущей командой к пину. Пример использования ИмяПривода.attach(9) – расшифровывается так: “сервопривод с названием «ИмяПривода» подключен к пину 9”.
Если у вашего привода длины управляющих импульсов отличаются от стандартных 544 и 2400 мкс, то их можно задать через запятую после номера пина, вот так servo.attach(pin, min, max), где servo – имя привода (имя переменной типа Servo), min – длина сигнала для минимального угла поворота (0°) в микросекундах, max – ширина импульса управляющего сигнала для максимального угла поворота (180°) в микросекундах.
write() — передаём приводу угол поворота в градусах (пример: ИмяПривода.write(180))
writeMicroseconds() — тоже самое, только указывает на длину сигнала в микросекундах.
read() — определяет текущее положение вала;
attached() — Проверяет подключена ли переменная типа Servo к пину с сервоприводом. Синтаксис — Servo.attached().
detach() — отмена команды attach, то есть отсоединяет определенный переменной типа Servo сервопривод от выхода.
4.7. Устойчивость усилителей с обратной связью
Усилители с ООС при определённых условиях могут самовозбуждаться, т.е. генерировать электрические колебания. Это свидетельствует о том, что усилитель прекращает свои функции по усилению электрических колебаний. При этом ООС превращается в ПОС. это происходит обычно за пределами рабочего диапазона частот из-за фазовых сдвигов в усилителе и в цепи обратной связи. Фаза как аргумент вектора петлевого коэффициента передачи Т изменяется:
Т = – β·К·е j∆φβК;
где величина ∆φβК определяется как сумма фазовых сдвигов в усилителе и в четырёхполюснике обратной связи:
∆φβК = ∆φК + ∆φβ ; (4.13)
Уравнение (4.13) определяет дополнительный фазовый сдвиг к 180º между векторными источниками сигнала UВХ.ИСТ и UВХ.СВ., т.е. (180º + ∆φβК). Причиной изменения фазы являются реактивные элементы схемы, а на высоких частотах дополнительно инерционность работы усилительных элементов.
При ООС и ПОС величина Т является действительной:
FООС = 1 + ТООС > 1;
FПОС = 1 – ТПОС < 1;
Пока ТПОС < 1, усилитель не возбуждается, хотя ООС превращается в ПОС, т.е. она оказывается ещё недостаточно глубокой для самовозбуждения. Генерация наступает при:
ТПОС = 1;
и коэффициент усиления с обратной связью будет иметь бесконечно большое значение:
Практически усилитель возбуждается на низких и высоких частотах при:
ТПОС ≥ 1 и φβК= 180º + ∆φβК
Для оценки устойчивости усилителя с обратной связью используются различные критерии. Наиболее приемлемым оказался критерий Найквиста, который заключается в следующем: “Если точка с координатами (–1;0) лежит внутри годографа вектора β К для диапазона частот от 0 до ∞, то система неустойчива, рис. 4.7а; если же точка (–1;0) лежит вне указанного годографа, система устойчива, рис. 4.7б”
Рис. 4.7. Диаграммы Найквиста для неустойчивого а) и устойчивого усилителей б) с обратной связью.
Для повышения устойчивости усилителей разработаны методы, суть которых сводится к следующему.
- В усилителе с обратной связью следует охватить как можно меньше число каскадов, т.к. это уменьшает сдвиг фаз петли обратной связи
- Применять в охваченных обратной связью каскадах схемы межкаскадовой связи, дающие малые фазовые сдвиги.
- При проектировании усилителей задаются допустимой степенью приближения годографа Т к критической точке; эта степень получала название запаса устойчивости усилителя. Различают запас устойчивости по модулю “X”
X = – 20lg |TX| при arg TX = π; и запас устойчивости по фазе “Y”;
πY = π – arg T при |TX| = 1
Для групповых усилителей, имеющих глубокую ООС принимают запасы устойчивости: по модулю 3n дБ, а по фазе 0,175 рад (10n град.), где n – число усилительных каскадов.
Описание [ править | править код ]
Сервоприводом является любой тип механического привода (устройства, рабочего органа), имеющий в составе датчик (положения, скорости, усилия и т. п.) и блок управления приводом (электронную схему или механическую систему тяг), автоматически поддерживающий необходимые параметры на датчике (и, соответственно, на устройстве) согласно заданному внешнему значению (положению ручки управления или численному значению от других систем).
Проще говоря, сервопривод является «автоматическим точным исполнителем» — получая на вход значение управляющего параметра (в режиме реального времени), он «своими силами» (основываясь на показаниях датчика) стремится создать и поддерживать это значение на выходе исполнительного элемента.
К сервоприводам, как к категории приводов, относится множество различных регуляторов и усилителей с отрицательной обратной связью, например, гидро-, электро-, пневмоусилители ручного привода управляющих элементов (в частности, рулевое управление и тормозная система на тракторах и автомобилях), однако термин «сервопривод» чаще всего (и в данной статье) используется для обозначения электрического привода с обратной связью по положению, применяемого в автоматических системах для привода управляющих элементов и рабочих органов.
Сервоприводы в настоящее время применяются в высокопроизводительном оборудовании следующих отраслей: машиностроение; автоматические линии производства: напитков, упаковки, стройматериалов, электроники и т. д., подъемно-транспортная техника; полиграфия; деревообработка, пищевая промышленность. [ источник не указан 817 дней ]
Области использования устройства
В современном мире, когда автоматизация заняла прочное место во всех областях машиностроения, конструкция всех механизмов стала удивительно унифицированной. В этом случае используются современные одинарные приводы.
Чтобы понять, что такое сервопривод, вы должны знать диапазон действия устройства.
Устройства содержат прецизионные конструкции для поддержания скорости промышленных роботов и станков с высокой точностью. Их устанавливают на буровое оборудование, в различные транспортные системы и вспомогательные механизмы.
Наибольшее распространение устройства получили в следующих областях:
- производство бумаги и упаковки;
- производство листового металла;
- погрузочно-разгрузочные работы;
- производство транспортных средств;
- деревообрабатывающая промышленность;
- производство строительных материалов.