Пример использование ПИД-регулятора в приводе насоса
Самая простая схема подключения представляет собой следующее:
- Датчик и внешнее оборудование подключается к входам.
- Задается нужное давление. При любом изменении параметра создается сигнал.
- Преобразователь снижает или уменьшает напряжение электродвигателя до достижения заданных параметров давления. Соответственно, давление от расхода в системе не зависит.
Это простейшая схема. Преобразователи также управлять могут несколькими показателями. К примеру, отопительные насосы регулируются по уличной температуре и теплоносителя. Выбор оборудования напрямую зависит от области применения.
Используются устройства ПИД-регулятором и в сложных конструкциях. Главное – выбрать правильное оборудование. Одним из надежных и востребованных считается регулятор Danfoss. Это профессиональное оборудование, способное прослужить не один десяток лет. Стоимость на него доступная, как частному лицу, так и крупной компании, поэтому приобрести это устройство не составит труда.
Назначение ПИД-регулятора
ПИД-регулятор принцип работы делает таким, что ограничений по применению нет. Ведь это, по сути, программные модули. Но особенно часто можно наблюдать такие устройства в гидравлических системах. Например, чтобы поддерживать давление жидкости на нужном уровне вне зависимости от того, как идёт потребление. Здесь настройка PID-регулятора не такая сложная.
Например, вот принцип, по которому поддерживают постоянное давление напорных трубопроводов:
1. Сигнал о текущем значении давления с аналоговых датчиков давления поступает на первый аналоговый вход ПИД-регулятора. Второй вход должен принять сигнал задания значения давления. В этом случае опираются на опорную частоту. Всё зависит так же от источника, от которого поступает информация на ПИД, что это — в каждом случае решают индивидуально.
2. Анализируется отклонение между заданными и фактическими значениями. В результате появляется сигнал управления и задания выходной частоты. ПИД-регулятор настройку коэффициентов делает обязательной почти для каждой ситуации.
3. Производительность электронасоса меняется. Это происходит, если требуется компенсировать изменение давления.
В этом случае давление сохраняет один и тот же уровень вне зависимости от того, как идёт эксплуатация. Настройка ПИД-регулятора легко и просто выполняется в специальных программах.
Чаще всего самостоятельно выбирают максимальный и минимальный уровень для того или иного значения. Надо учитывать, что спецификой обладает не только дифференциальный регулятор, но и величины, которые образуются с помощью программного алгоритма управления. Например, иногда требуется не один, а сразу два прибора, чтобы нормально регулировать температуру. Один из них отвечает за охлаждение, второй за нагрев.
Цифровой ПД-регулятор — самая современная разновидность устройств.
Для таких устройств часто создают схемы, в которых присутствуют управляющие контроллеры. Именно они обеспечивают работу приспособлений в соответствующем режиме. Настройка ПИД-регулятора для чайников предполагает наличие модификаций, в которых все показатели выставлены заранее. Поэтому не составит труда корректировать всё во время эксплуатации.
Можно рассмотреть ещё один пример того, как работает ПИД-регулятор. Необходимо организовать проветривание помещения. И сделать так, чтобы окно открывалось больше, если температура в помещении увеличивается. На окно ставят привод, плавно поворачивающийся с соблюдением заданного угла. Управление осуществляется определённой силой тока, как правило, 4-20 мА.
Практически все приводы поддерживают этот показатель. 4 мА означают, что окно закроется. 20 мА полностью закроют конструкцию. Так работает любой ПИД-регулятор, что это — уже рассматривали выше.
Датчики и термопары для решения задач можно брать любые. Главное — чтобы были унифицированные выходы на соответствующие показатели.
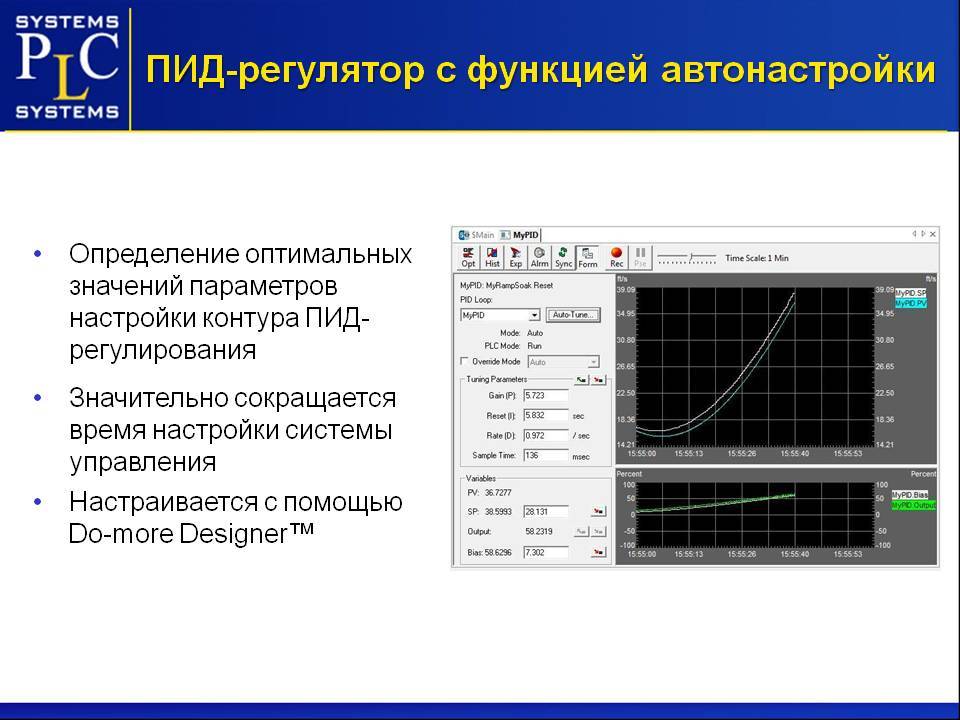
Проще всего взять ПИД контроллер с функцией автонастройки. То есть, регулятор сам имитирует воздействие окружающей среды. После этого переходят к следующим этапам:
1. Отслеживание реакции системы.
2. Корректировка коэффициентов.
Но далеко не всегда получается настроить PID-регулятор температуры именно такими методами. Ведь устройство ничего не знает о системе, которая эксплуатируется в реальности. Поэтому тестовые и практические возмущения с большой вероятностью не совпадут друг с другом. Тогда коэффициенты выбирают вручную, чтобы расчёт ПИД-регулятора был правильным.
Если настройки окажутся ошибочными — то показатель будет скакать туда-сюда. Это значит, что нужно повторить процесс, исправив интегральный регулятор. Он выравнивается сам спустя некоторое время, если всё правильно.
Заключительные мысли
Вот и был рассмотрен ПИД-регулятор. Его применяют почти везде, где требуется автоматическое управление. ИК паяльные станции, специальные печи, столы 3D-принтеров, паяльники и сопла, инкубаторы, холодильники — вот лишь некоторые и самые известные примеры применения для таких устройств, как ПИД-регулятор, расшифровка которых всем понятна.
Эта деталь стоит в любых балансирующих устройствах. Например, в левитирующих магнитных платформах и сегвеях, гироскутерах. Здесь так же работают законы регулирования П, ПИ, ПИД, для чайников всё тоже легко объясняется.
Выпускают и другие устройства, которые выигрывают по адаптивности к управляемым системам и стабильности. Но нужно выполнить очень много действий, чтобы настроить их. ПИД-регулятор тоже отличается сложностью, но со временем с ним справляется любой пользователь.
Если разобраться в том, как настроить ПИД-регулятор, то можно будет определить следующие показатели:
1. Инерция.
2. Форма графиков переходных процессов.
3. Скорость регулировки. ПИД-регулятор коэффициенты сам не выставляет, нужно участие человека в большинстве случаев.
4. Точность.
В целом для каждой ситуации можно использовать типичные схемы, когда выполняется настройка ПИДов
Важно только выбрать оптимальные значения для каждого из коэффициентов. Используется термин установки или уровень давления для гидравлических систем
Их поддерживает любой ПИД-регулятор, настройка которого выполняется до начала работы.
Сложности часто возникают из-за того, что точные характеристики объекта не выдают заранее. Поэтому используют эвристические и эмпирические методы вычисления. А потом уже переходят к практическим оптимальным цифрам, подобранным опытным путём. ПИД-регулирование для чайников при необходимости тоже легко объяснить.
Параметры электропривода тоже нужно знать перед настройкой. Ведь иначе система регулирования не будет работать стабильно. При этом каждая модель устройства снабжается подробной инструкцией. Технические специалисты тоже всегда подскажут, как именно функционирует то или иное устройство. И помогут выбрать ПИД, расшифровка отдельных показателей тоже даётся.
Пример использования
Допустим, необходимо реализовать проветривание помещения следующим образом: чем больше температура внутри, тем больше нужно открыть окно. Для этого установим на окно привод, который будет плавно поворачиваться на заданный угол, а управляться будет сигналом тока 4…20 мА (такой управляющий сигнал поддерживают практически все подобные приводы). То есть, если подать на привод сигнал 4 мА — он полностью закроет окно, а 20 мА — полностью его откроет.
Для измерения температуры можно взять любой из поддерживаемых ТРМ210 — это практически любые термопары и любые датчики имеющие унифицированные выходы 0…10 В и 4…20 мА.
Примеры применения ПИД-регулятора
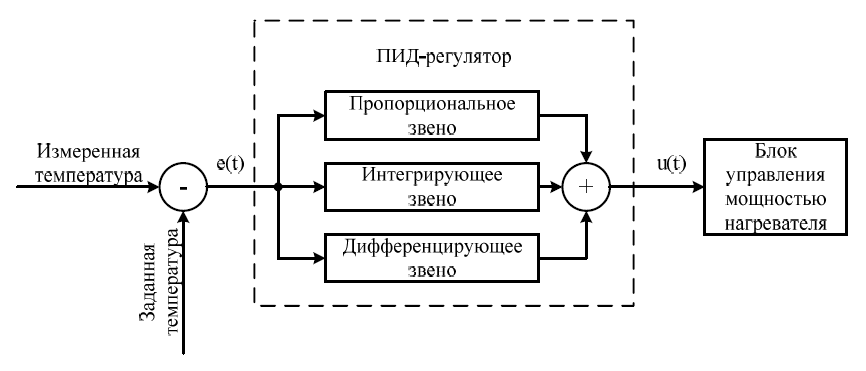
Пример 1: Температурный контроль
ПИД-регуляторы широко применяются для контроля и регулирования температуры в различных системах. Например, в системе отопления или в промышленных процессах, где необходимо поддерживать определенную температуру внутри системы.



ПИД-регулятор обеспечивает стабильный и точный контроль температуры путем анализа разницы между желаемым значением и текущим значением температуры. Он регулирует нагревательный элемент таким образом, чтобы поддерживать заданную температуру с минимальными колебаниями.
Пример 2: Скорость двигателя
ПИД-регуляторы также широко используются для контроля скорости двигателей. В автомобилях, робототехнике и других системах, где требуется точное управление скоростью движения, ПИД-регуляторы помогают достичь стабильной и плавной работы.
ПИД-регулятор анализирует разницу между желаемой скоростью и текущей скоростью двигателя, и регулирует подачу топлива или электрический ток на двигатель таким образом, чтобы достичь и поддерживать нужную скорость. Это позволяет автоматически управлять скоростью двигателя в различных условиях и обеспечивать стабильную работу.
Пример 3: Регулирование уровня жидкости
В системах, где требуется точное управление уровнем жидкости, ПИД-регуляторы проявляют себя весьма эффективно. Они могут использоваться в бассейнах, танках с водой и других системах, чтобы поддерживать определенный уровень жидкости.
ПИД-регулятор анализирует разницу между желаемым уровнем и текущим уровнем жидкости, и управляет клапанами или насосами таким образом, чтобы поддерживать уровень на нужной отметке. Это позволяет избежать переливов или недостаточного уровня жидкости и обеспечивает стабильность работы системы.
Применение ПИД-регулятора в промышленности
Применение ПИД-регулятора в промышленности обеспечивает множество преимуществ, таких как:
- Улучшение точности и стабильности — ПИД-регуляторы позволяют поддерживать заданное значение величины с высокой точностью и стабильностью. Они способны быстро реагировать на изменения внешних условий и подстраивать выходной сигнал для достижения желаемого результата.
- Автоматизация процесса — ПИД-регуляторы могут быть легко интегрированы в системы автоматического управления и контроля. Они способны оперативно контролировать и регулировать различные параметры процесса, что позволяет сократить количество человеческих ошибок и улучшить эффективность производства.
- Адаптивность к изменениям — ПИД-регуляторы обладают возможностью адаптироваться к изменяющимся условиям процесса. Они способны автоматически реагировать на изменения входных сигналов и динамически менять параметры регулятора, чтобы поддерживать желаемый уровень контролируемой величины.
Примеры применения ПИД-регуляторов в промышленности включают управление температурой и давлением в производственных процессах, регулирование скорости и позиции в двигателях и роботах, контроль уровня жидкостей и многое другое. Во многих отраслях промышленности, таких как пищевая, печатная, химическая и автомобильная промышленность, ПИД-регуляторы являются неотъемлемой частью автоматизированных систем управления.
Выводя все вместе, ПИД-регуляторы играют важную роль в промышленности, обеспечивая стабильность и точность в работе различных процессов и систем. Их применение позволяет снизить количество человеческого вмешательства, увеличить эффективность производства и обеспечить высокое качество продукции.
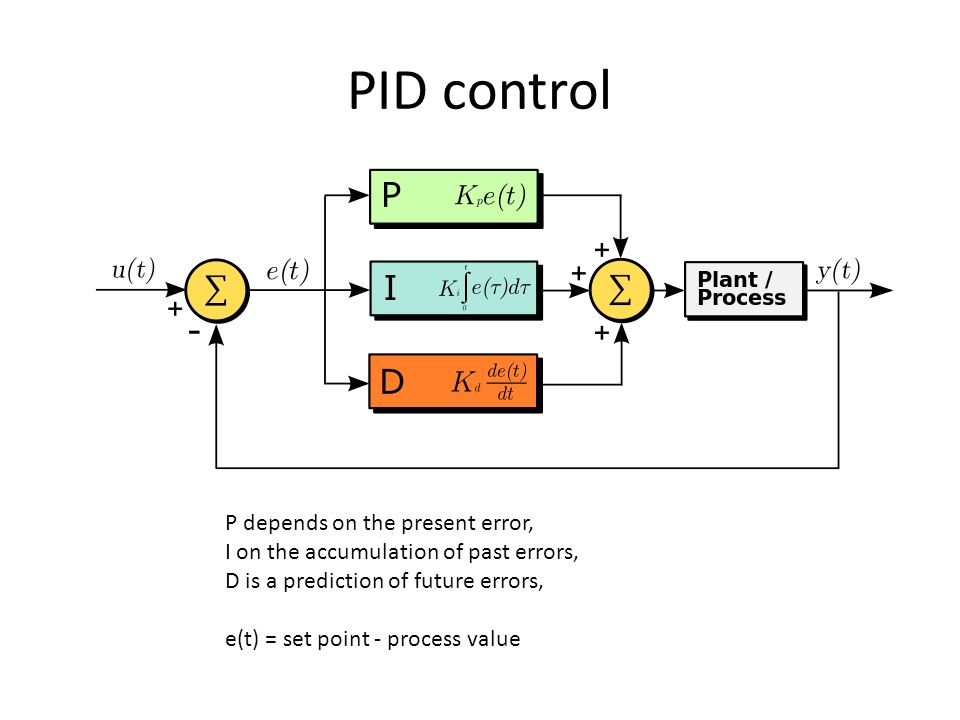
Под капотом у ПИД регулятора
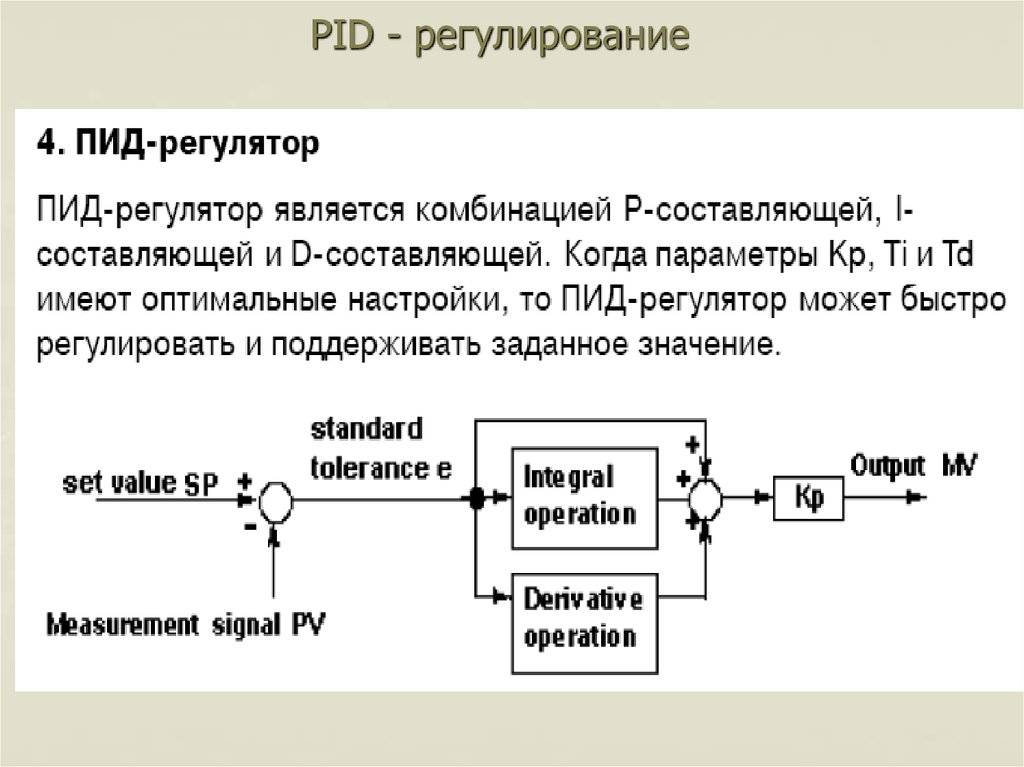
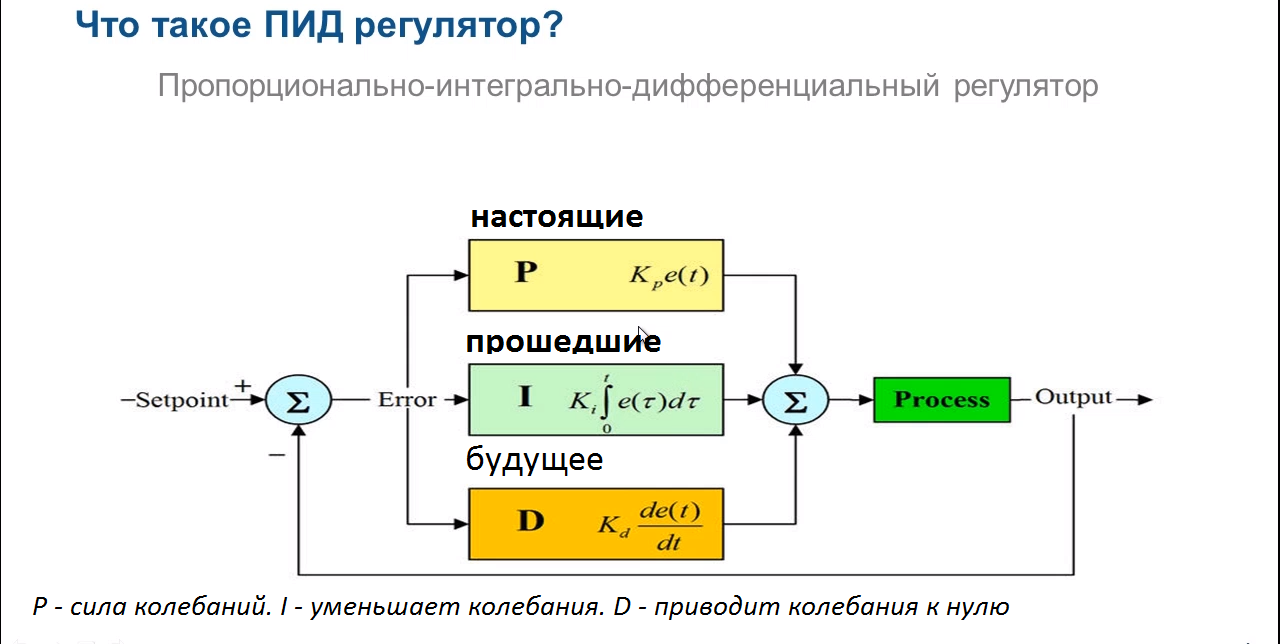
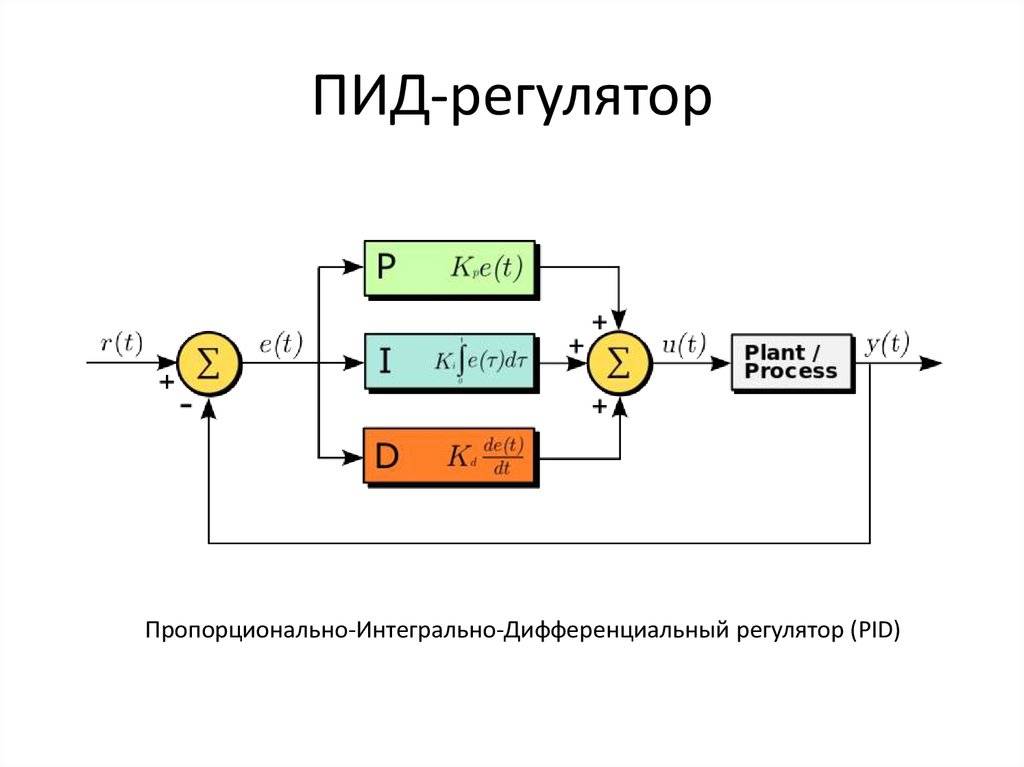
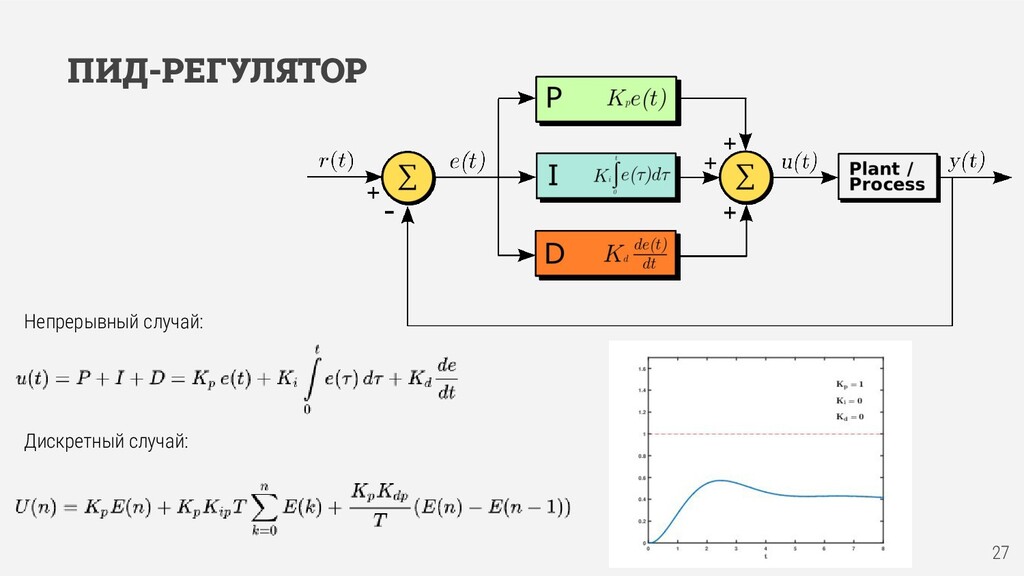
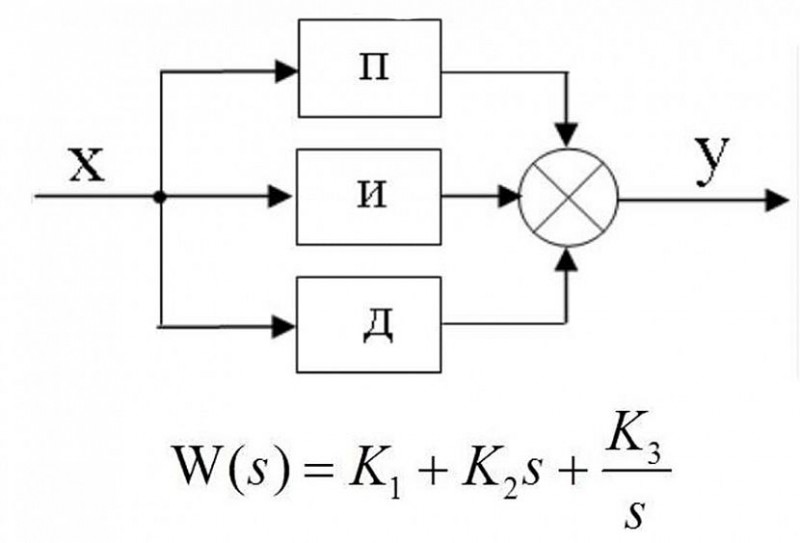
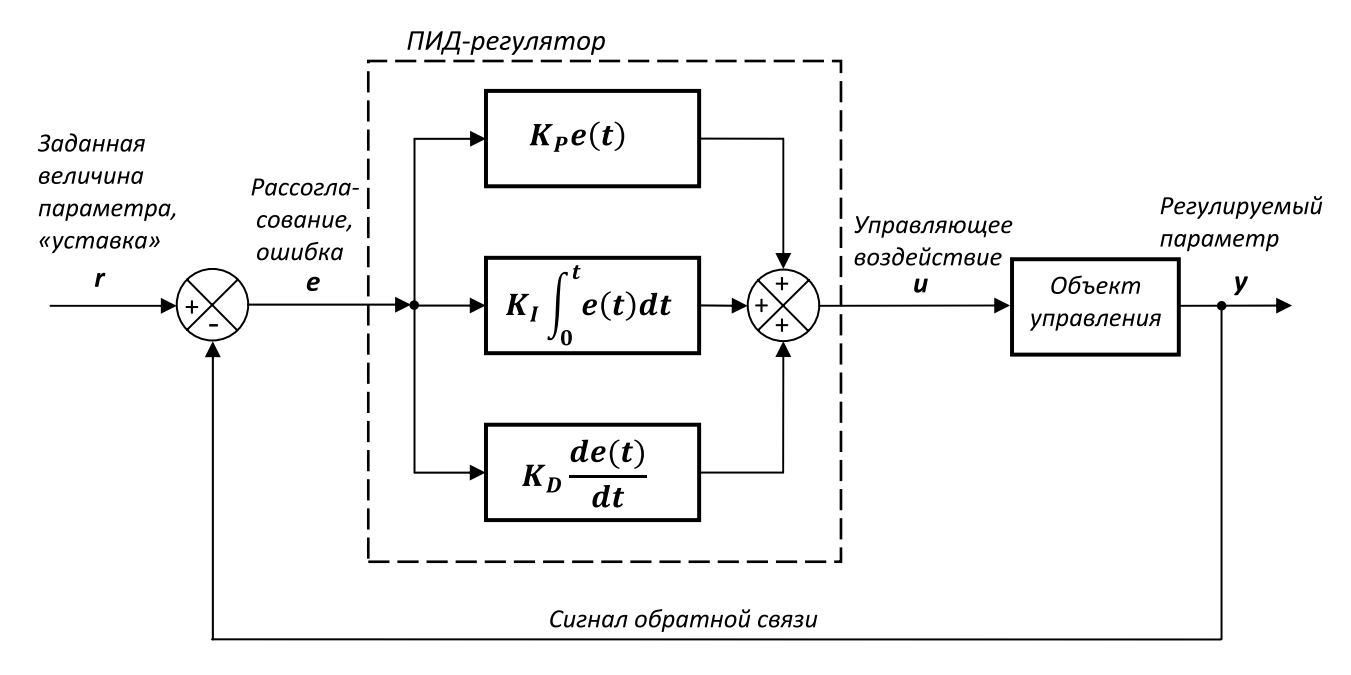
ПИД регулятор состоит из трёх составляющих: пропорциональной P, интегрирующей I и дифференциирующей D, формируется просто как сумма трёх значений, умноженных каждая на свой коэффициент. Эта сумма после вычислений становится управляющим сигналом, который подаётся на управляющее устройство, обозначим его как out.
kP, kI и kD это и есть те самые коэффициенты, которые нужно настроить для работы ПИДа. Значения тут могут быть самые разные, от 0.001 то десятков и тысяч, это зависит от конкретной системы. Тут есть ещё один момент: любой коэффициент может быть равен нулю, и в таком случае обнуляется вся его компонента. То есть регулятор можно превратить в П, ПИ, ПД, и прочие сочетания. Разные системы требуют разного подхода, именно поэтому ПИД регулятор такой универсальный. В дальнейшем будем пользоваться следующими названиями переменных:
- out – выход с регулятора (управляющий сигнал)
- setpoint – установка (заданное значение)
- input – вход (значение с датчика)
- err – ошибка регулирования
- dt – период вычисления и регулирования
P составляющая
Пропорциональная составляющая предоставляет собой разность текущего значения с датчика и установки.
Данная разность называется ошибкой регулирования, то есть насколько далеко находится система от заданного значения. Получается чем больше ошибка, тем больше будет управляющий сигнал и тем быстрее система будет приводить управляемую величину к заданному значению. Коэффициент kP тут влияет роль усиления ошибки и настраивается вручную. Но в то же время, если система пришла к заданной величине, ошибка станет равной нулю, и управляющий сигнал тоже! Другими словами, п регулятор никогда не сможет привести к заданному значению, всегда будет некая ошибка. П составляющая является основной в ПИД регуляторе и так сказать тянет самую большую лямку, регулятор может неплохо работать только лишь на ней одной. P составляющая исправляет ошибку в текущий момент времени.
I составляющая
Интегральная составляющая просто суммирует в саму себя ту же самую ошибку, разность текущего и заданного значения, умноженную на период дискретизации системы, то есть на время, прошедшее с предыдущего расчёта dt – фактически берёт интеграл от ошибки по времени.
В самом регуляторе это ещё умножается на коэффициент kI, которым настраивается резкость данной составляющей. В интегральной составляющей буквально копится ошибка, что позволяет регулятору с течением времени полностью её устранить, то есть привести систему ровно к заданному значению с максимальной точностью. I составляющая исправляет прошлые, накопившиеся ошибки.
D составляющая
Дифференциальная составляющая представляет собой разность текущей и предыдущей ошибки, поделенную на время между измерениями, то есть на ту же dt, которая общий период регулятора. Иными словами – это производная от ошибки по времени.
Фактически D составляющая реагирует на изменение сигнала с датчика, и чем сильнее происходит это изменение, тем большее значение прибавляется к общей сумме. Иными словами, D позволяет компенсировать резкие изменения в системе и при правильной настройке предотвратить сильное перерегулирование и уменьшить раскачку. Коэффициент д позволяет настроить вес, или резкость данной компенсации, как и остальные коэффициенты регулируют свои составляющие. D составляющая в первую очередь нужна для быстрых систем, то есть для систем с резкими изменениями, такие как квадрокоптер или шпиндель станка под переменной нагрузкой. D составляющая исправляет возможные будущие ошибки, анализируя скорость.
Методика настройки ПИД-регулятора
Выбор алгоритма управления и его настройка является основной задачей в процессе проектирования и последующего удовлетворительного запуска агрегата в промышленную или иную эксплуатацию.
В основе методики лежит закон Циглера-Никольса, являющийся эмпирическим и основанным на использовании данных, полученных экспериментально на реальном объекте.
В результате ознакомления с методикой, а также при близком рассмотрении объектов регулирования, были выбраны формулы и коэффициенты ближе всего подходящие к реальному объекту регулирования.
Объект регулирования – камерная электрическая печь. Число зон регулирования от 24 до 40. Каждая зона есть набор электронагревателей. Материал нагревателей нихром. Тип — проволочные, навитые на керамические трубки.
Требования: поддержание температуры по зонам печи +/- 5С.
МЕТОДИКА:
Настройка пропорциональной компоненты (Xp)
- Перед настройкой зоны пропорциональности интегральная и дифференциальная компоненты отключаются:
- Постоянная интегрирования устанавливается минимально возможной (Ти =0),
- Постоянная дифференцирования минимально возможной (Тд = 0).
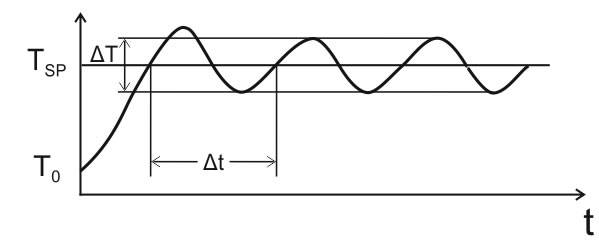
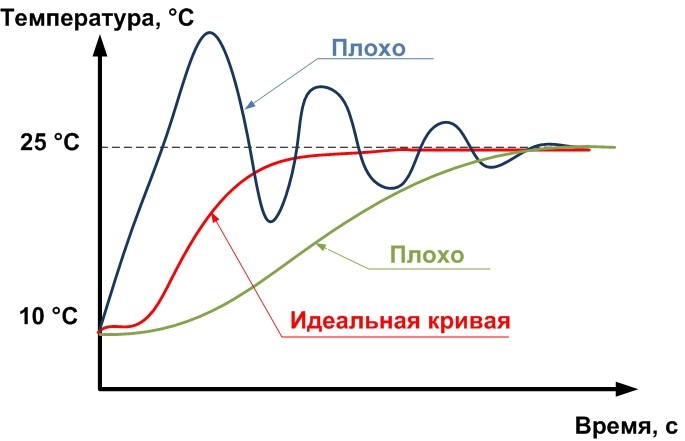
Тο — начальная температура в системе; Тsp — заданная температура (уставка); ∆T — размах колебаний температуры; ∆t — период колебаний температуры.
- Меняем значение пропорциональной составляющей Xp от минимума (0) до момента, пока не появятся устойчивые колебания системы с периодом ∆t.
Система должна находится в постоянном колебательном процессе, притом колебательный процесс незатухающий, где ∆T– характеристика колебания равная значению величины рассогласования (±10С, или как по заданию). Колебания должны быть одинаковы от Тsp.
После получения данной кривой на нашем объекте, засекаем время периода колебаний ʌt – полный период. Данное время есть характеристика системы, оборудования.

3. Используя полученные параметры рассчитываем Ти и Тд.
| Зона пропорциональности | Коэффициент передачи | Постоянная времени интегрирования | Постоянная времени дифференцирования | |
| П-регулятор | 2*PBs | 0.5*Xp | ||
| ПИ-регулятор | 2.2*PBs | 0.45*Xp | 0.83*ʌТ | |
| ПИД-регулятор | 1.67*PBs | 0.6*Xp | 0.5*ʌТ | 0.125*ʌТ |
Цифры в формулах для расчета коэффициентов ПИД-регулирования скорректированы на основе запуска камерной электрической печи в опытно-промышленную эксплуатацию. И конечно в зависимости от типа объекта регулирования могут незначительно меняться.
Частотник danfoss vlt micro fc 51. Проблемы с установками частоты.
У меня возникла следующая проблема. Купили вытяжную приточную установку вместе со щитом управления. К щиту управления подключаются преобразователи частоты VLT Micro Drive – Danfoss, на вытяжную вентиляцию и на приток.
Не знаю как разобраться в описании: как настраивать преобразователь частоты, чтобы он мог выключаться командой с управляющего пульта. Частотный преобразователь работает один. Подключили к нему сеть питания – он работает. Отключать его можно, выключив автоматический выключатель или нажав кнопку на корпусе прибора. Это очень неудобно.
Я изучал инструкцию, очень большую, ответа так и не нашел на мой вопрос. Нашел лишь то, что написано: «сигнал управления подается на контакт №18. Взял и подключил на этот контакт сигнал управления, но ничего не изменилось.
Оказалось, что надо искать причину от того, что на частотный преобразователь не подключены контакты термореле от моторов вентиляторов. Это контролирование тока. Учитывая эту информацию, настроили частотный преобразователь VLT Micro Drive – Danfoss во 2-й раз. Есть электрическая схема, но в ней ничего не понятно.
Три коэффициента ПИД регулятора и принцип работы
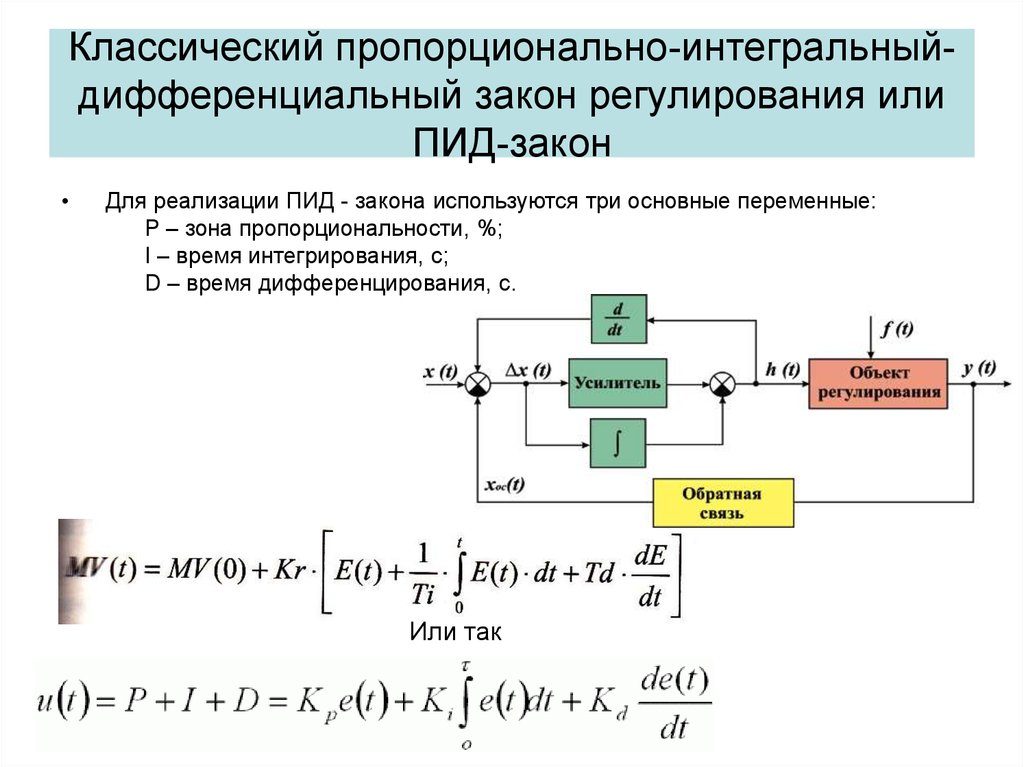
Работа ПИД-регулятора заключается в подаче выходного сигнала о силе мощности, необходимой для поддержания регулируемого параметра на заданном уровне. Для вычисления показателя используют сложную математическую формулу, в составе которой есть 3 коэффициента — пропорциональный, интегральный, дифференциальный.
Возьмем в качестве объекта регулирования ёмкость с водой, в которой необходимо поддерживать температуру на заданном уровне с помощью регулирования степени открытия клапана с паром.
Пропорциональная составляющая появляется в момент рассогласования с вводными данными. Простыми словами это звучит так — берется разница между фактической температурой и желаемой, умножается на настраиваемый коэффициент и получается выходной сигнал, который должен подаваться на клапан. Т.е. как только градусы упали, запускается процесс нагрева, поднялись выше желаемой отметки — происходит выключение или даже охлаждение.
Дальше вступает интегральная составляющая, которая предназначена для того, чтобы компенсировать воздействие окружающей среды или других возмущающих воздействий на поддержание нашей температуры на заданном уровне. Поскольку всегда присутствуют дополнительные факторы, влияющие на управляемые приборы, в момент поступления данных для вычисления пропорциональной составляющей, цифра уже меняется. И чем больше внешнее воздействие, тем сильнее происходят колебания показателя. Происходят скачки подаваемой мощности.
Интегральная составляющая пытается на основе прошлых значений температуры, вернуть её значение, если оно поменялось. Подробнее процесс описан в видео ниже.
А дальше выходной сигнал регулятора, согласно коэффициенту, подается для повышения или понижения температуры. Со временем подбирается та величина, которая компенсирует внешние факторы, и скачки исчезают.
Интеграл используется для исключения ошибок путем расчета статической погрешности. Главное в этом процессе — подобрать правильный коэффициент, иначе ошибка (рассогласование) будет влиять и на интегральную составляющую.
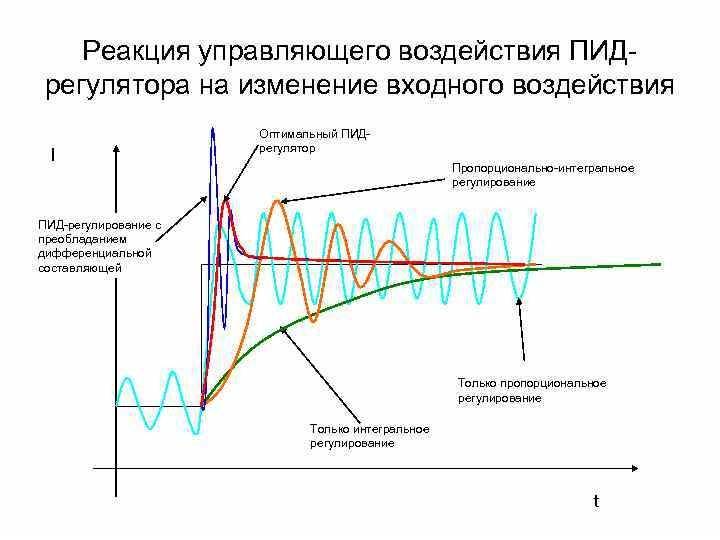
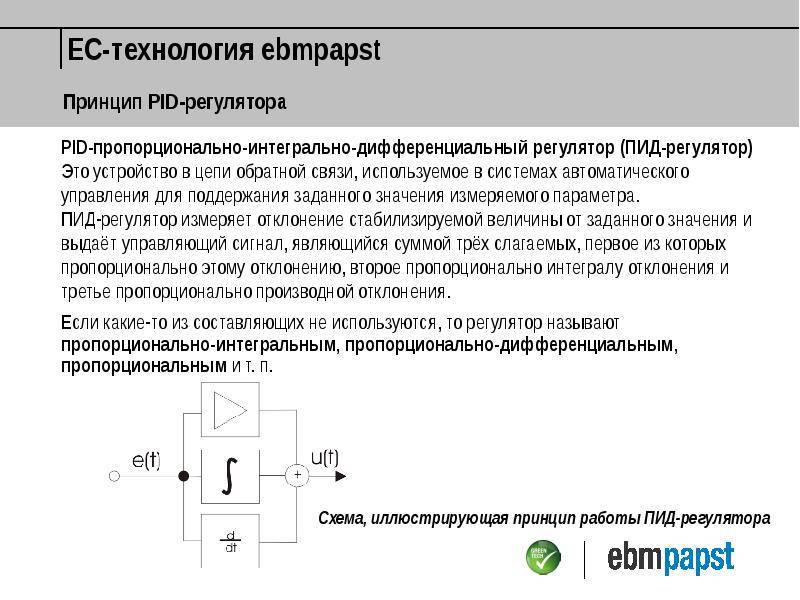
Пропорционально-интегрально-дифференциальный регулятор (ПИД) – устройство для автоматического поддержания в заданном интервале одного или нескольких параметрах. Такие устройства универсальны, при помощи ПИД-регуляторов можно реализовать любые законы регулирования.
Пропорционально-интегрально-дифференциальный регулятор (ПИД) – устройство для автоматического поддержания в заданном интервале одного или нескольких параметрах. Такие устройства универсальны, при помощи ПИД-регуляторов можно реализовать любые законы регулирования.
Они учитывают фактическая величину, заданное значение, разность значений и скорость изменения контролируемых характеристик.
Регуляторы такого типа широко применяются в локальных системах управления промышленным оборудованием, централизованных АСУТП, в робототехнике. Устройства позволяют быстро возвращать регулируемый параметр в допустимый интервал, точно удерживать величину и быстро реагировать на возмущающие воздействия.
5.2.2. И-регулятор
Рассмотрим теперь случай, когда в ПИД-регуляторе остается только интегральный член, т.е. и . Из (5.39) получим
| . | (5.47) |
Модуль и аргумент передаточной функции (5.47) равны
| , . | (5.48) |
АЧХ И-регулятора в логарифмическом масштабе представляет собой прямую линию с наклоном ‑20дб/дек во всем диапазоне частот, от 0 до , которая пересекает ось частот (проведенную при ) в точке . ФЧХ представляет собой горизонтальную линию с ординатой .
На низких частотах, при , коэффициент передачи регулятора (5.48) больше единицы и стремится к бесконечности при . Поскольку случаю во временной области соответствует , или установившийся (равновесный) режим для асимптотически устойчивых систем, то передаточная функция любого устойчивого объекта (за исключением объектов с интегрирующими процессами, см. раздел ) при будет равна статическому коэффициенту передачи . Поэтому, подставляя в (5.42) и , получим для системы с И-регулятором
| . | (5.49) |
|
Рис. 5.38. Реакция на скачок замкнутой системы с объектом 2-го порядка (5.50) с И-регулятором при и разных |
Это означает, что система с И-регулятором не имеет ошибки в установившемся режиме.
Отметим аналогию между И-регулятором и операционным усилителем. Операционный усилитель (ОУ) имеет передаточную функцию вида , параметры которой для типовых микросхем ОУ равны , . Поэтому практически во всем рабочем диапазоне частот и передаточная функция ОУ описывается упрощенным выражением , т.е. совпадает с передаточной функцией И-регулятора. Схемы включения ОУ также подобны структурам систем управления с И-регулятором.
На показаны переходные характеристики замкнутой системы с И-регулятором и объектом второго порядка вида
| , где . | (5.50) |
При больших постоянных интегрирования переходная характеристика имеет вид, сходный с характеристикой апериодического звена. С уменьшением растет усиление регулятора в соответствии с (5.48) и когда на частоте петлевое усиление контура с обратной связью приближается к 1, в системе появляются колебания (, кривая ).




Вторым фактором, влияющим на устойчивость замкнутой системы, является дополнительный сдвиг фаз величиной -, вносимый И-регулятором в контур регулирования. Поэтому объект 1‑го порядка с малой транспортной задержкой, или объект 2-го порядка, устойчивый в контуре с П-регулятором, может потерять устойчивость в контуре с И-регулятором.
Настраивание ПИД-регулятора
Для моторной управляемости системы настраивание ПИД-регулятора бывает сложным процессом. Расскажем, какие шаги для настройки могут сделать проще эту процедуру.
- Определите значение дифференциальной и интегральной равной нулю. Определите наибольшую скорость и контролируйте системную реакцию.
- Повышайте составляющую прямопропорционально и выполните первый пункт. Продолжайте действия до момента начала процесса с автоматическими колебаниями возле точки определения скорости.
- Снижайте пропорциональную величину, пока система не стабилизируется. Волны колебаний начнут затухать.
- Определите пропорциональную величину около 15% меньше этого постоянного пункта.
- Определяйте наибольшую скорость прерывисто, повышайте суммирующую составляющую до начала уменьшения колебаний скорости перед стабильным состоянием системы. Снижайте суммирующую составляющую до достижения системой определенной скорости без ошибки и колебаний.
- Во многих системах настраивание составляющей дифференциального вида не нужно. Если нужно быстродействие системы больше, то можно достигнуть этого путем настройки составляющей дифференциального вида. Устанавливайте скорость по интервалам, повышайте составляющую дифференциального вида, пока не стабилизируется система с наименьшим временем действия (повышайте медленно, избегая состояния нестабильности). Система станет оптимальной при одном перерегулировании.
- Контролируйте стабильность системы, устанавливая значения скорости с интервалами и периодами для гарантированной стабильности системы при плохом исполнении задания.
Три составляющих рабочего процесса ПИД-регулятора
Формирование выходного сигнала осуществляет пропорциональная составляющая. Данный сигнал удерживает входную величину, подлежащую регулировке, на нужном уровне и не дает ей отклоняться. С повышением этого отклонения возрастает и уровень сигнала.
Если на входе регулируемая величина сравняется с заданным значением, то уровень выходного сигнала будет равен нулю. Однако на практике невозможно отрегулировать нужную величину с помощью лишь одной пропорциональной составляющей и стабилизировать ее на определенном уровне. Всегда существует вероятность статической ошибки, равной величине отклонения, поэтому стабилизация выходного сигнала останавливается на этом значении.

Данная проблема решается за счет использования второго, интегрирующего компонента. Его основным элементом является интеграл по времени, взятый от общей величины рассогласования. То есть, интегральная составляющая находится в пропорции с этим интегралом. Данный компонент способен ликвидировать статическую ошибку, так как регулятор постепенно накапливает учет статической погрешности.
Таким образом, при отсутствии внешних воздействий, через определенный период времени регулируемая величина будет приведена в стабильное состояние на отметке правильного значения. В этом случае величина пропорциональной составляющей будет нулевой, а интегрирующая полностью обеспечивает точность выходных данных. Однако и она может вызвать неточности, требующие исправления, в случае неправильного выбора коэффициента.
Эти отклонения устраняются за счет третьих – дифференциальных составляющих, пропорциональных с темпом изменяющегося отклонения величины. Она препятствует отклонениям, возможным в перспективе под влиянием задержек или внешних воздействий. Все три компонента дискретно связаны между собой.
Ограничения ПИД-регулятора
Хотя ПИД-регуляторы применимы к большинству задач управления, они могут быть плохими в других приложениях. ПИД-регуляторы, используемые отдельно, могут давать плохую производительность, когда коэффициент усиления ПИД-регулятора необходимо уменьшить, чтобы он не отключался или не колебался выше заданного значения . Производительность системы управления может быть улучшена за счет объединения замкнутого контура ПИД-регулятора с разомкнутым контуром. Знание системы (например, необходимое ускорение или инерция ) может быть активировано и объединено с выходным сигналом ПИД-регулятора для повышения конечной производительности системы. Только авансовое значение(или Control Feedforward) может обеспечить наибольшую часть выходных данных контроллера. ПИД-регулятор может использоваться в первую очередь для реагирования на любые различия или «ошибки», которые остаются между заданным значением и фактическим значением процесса. Поскольку на выходной сигнал контура прямой связи не влияет обратная связь процесса , он никогда не может вызвать колебания системы, повышая производительность, скорость отклика и стабильность системы.
Например, в большинстве систем управления движением для ускорения механической нагрузки требуется большее усилие (или крутящий момент ) двигателя. Если ПИД-контур используется для управления скоростью нагрузки и создания необходимой силы или крутящего момента для двигателя, может быть полезно взять желаемое мгновенное значение ускорения для нагрузки и добавить его к выходному сигналу ПИД-регулятора. Это означает, что независимо от того, ускоряется или замедляется нагрузка, пропорциональная силауправляется двигателем в дополнение к значению обратной связи ПИД-регулятора. ПИД-контур в этой ситуации использует информацию обратной связи для увеличения или уменьшения разницы между уставкой и первым значением. Работая вместе, комбинация прямой и обратной связи обеспечивает более надежную и стабильную систему.
Другая проблема с PID заключается в том, что он линейный . В основном производительность ПИД-регуляторов в нелинейных системах является переменной. Еще одна распространенная проблема ПИД-регулятора заключается в том, что в производной части шум может влиять на систему , в результате чего эти небольшие вариации приводят к очень большим изменениям на выходе. Обычно фильтр нижних частот помогает, поскольку он удаляет высокочастотные компоненты шума. Однако FPB и производное управление могут привести к тому, что они нейтрализуют друг друга. В качестве альтернативы производное управление может быть удалено в некоторых системах без значительной потери контроля. Это эквивалентно использованию ПИД-регулятора, такого как только ПИ.
Настройка регулятора
Для настройки регулятора нужно варьировать коэффициенты:
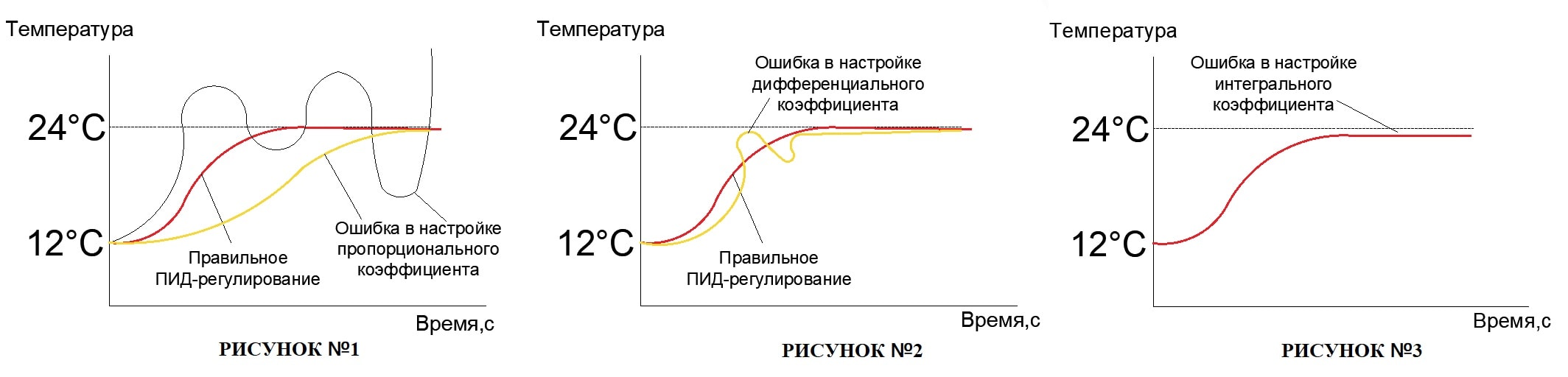
- При увеличении kP увеличивается скорость выхода на установленное значение, увеличивается управляющий сигнал. Чисто математически система не может прийти ровно к заданному значению, так как при приближении к установке П составляющая пропорционально уменьшается. При дальнейшем увеличении kP реальная система теряет устойчивость и начинаются колебания.
- При увеличении kI растёт скорость компенсации накопившейся ошибки, что позволяет вывести систему точно к заданному значению с течением времени. Если система медленная, а kI слишком большой – интегральная сумма сильно вырастет и произойдёт перерегулирование, которое может иметь характер незатухающих колебаний с большим периодом. Поэтому интегральную сумму в алгоритме регулятора часто ограничивают, чтобы она не могла увеличиваться и уменьшаться до бесконечности.
- При увеличении kD растёт стабильность системы, она не даёт системе меняться слишком быстро. В то же время kD может стать причиной неадекватного поведения системы и постоянных скачков управляющего сигнала, если значение с датчика шумит. На каждое резкое изменение сигнала с датчика Д составляющая будет реагировать изменением управляющего сигнала, поэтому сигнал с датчика нужно фильтровать (читай урок по фильтрам).
Вот так выглядит процесс стабилизации при изменении коэффициентов: Настройка регулятора – дело не очень простое. Начальные коэффициенты для подбора можно получить по следующему алгоритму: сначала выставляем все коэффициенты в 0. Плавно увеличиваем kP до появления незатухающих колебаний. Значение kP, при котором они появились, запишем и обозначим как kP1. Далее замеряем период колебаний системы в секундах, обозначим как T. Итоговые коэффициенты получим так:
- kP = 0.6 * kP1
- kI = kP / T * 2 * dt
- kD = kP * T / 8 / dt
Например, незатухающие колебания появились при kP 20, период колебаний составил 3 секунды. Период dt в системе будет 50 мс (0.05 с). Считаем:
- kP: 0.6*20=12
- kI: 12/3*2*0.05=0.4
- kD: 12*2/8/0.05=60
На полученных коэффициентах должны более-менее работать большинство систем, но не все. Также можно воспользоваться автоматическим тюнером коэффициентов, например два разных алгоритма встроены в библиотеку GyverPID.